熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


一、鏡頭主要參數
1.焦距(Focal Length)
焦距是從鏡頭的中心點到膠平面上所形成的清晰影像之間的距離。焦距的大小決定著視角的大小,焦距數值小,視角大,所觀察的范圍也大;焦距數值大,視角小,觀察范圍小。根據焦距能否調節,可分為定焦鏡頭和變焦鏡頭兩大類。
2.光圈(Iris)
用F表示,以鏡頭焦距f和通光孔徑D的比值來衡量。每個鏡頭上都標有最大F值,例如 8mm /F1.4代表最大孔徑為 5.7毫米 。F值越小,光圈越大,F值越大,光圈越小。
3.對應最大CCD尺寸(Sensor Size)
鏡頭成像直徑可覆蓋的最大CCD芯片尺寸。主要有:1/2″、2/3″、1″和1″以上。
4.接口(Mount)
鏡頭與相機的連接方式。常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
5.景深(Depth of Field,DOF)
景深是指在被攝物體聚焦清楚后,在物體前后一定距離內,其影像仍然清晰的范圍。景深隨鏡頭的光圈值、焦距、拍攝距離而變化。光圈越大,景深越小;光圈越小、景深越大。焦距越長,景深越小;
焦距越短,景深越大。距離拍攝體越近時,景深越小;距離拍攝體越遠時,景深越大。
6.分辨率(Resolution)
分辨率代表鏡頭記錄物體細節的能力,以每毫米里面能夠分辨黑白對線的數量為計量單位:“線對/毫米”(lp/mm)。分辨率越高的鏡頭成像越清晰。
7、工作距離(Workingdistance,WD)
鏡頭第一個工作面到被測物體的距離。
8、視野范圍(Field of View,FOV)
相機實際拍到區域的尺寸。
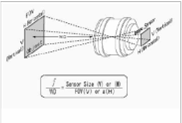
9、光學放大倍數(Magnification,?)
CCD/FOV,即芯片尺寸除以視野范圍。
10、數值孔徑(NumericalAperture,NA)
數值孔徑等于由物體與物鏡間媒質的折射率n與物鏡孔徑角的一半(a\2)的正弦值的乘積,計算公式為N.A=n*sin a/2。數值孔徑與其它光學參數有著密切的關系,它與分辨率成正比,與放大率成正比。也就是說數值孔徑,直接決定了鏡頭分辨率,數值孔徑越大,分辨率越高,否則反之。
11、后背焦(Flange distance)
準確來說,后倍焦是相機的一個參數,指相機接口平面到芯片的距離。但在線掃描鏡頭或者大面陣相機的鏡頭選型時,后倍焦是一個非常重要的參數,因為它直接影響鏡頭的配置。不同廠家的相機,哪怕接口一樣也可能有不同的后倍焦。
二、鏡頭的選型
1.選擇鏡頭接口和最大CCD尺寸
鏡頭接口只要可跟相機接口匹配安裝或可通過外加轉換口匹配安裝就可以了;鏡頭可支持的最大CCD尺寸應大于等于選配相機CCD芯片尺寸。
2.選擇鏡頭焦距
3.選擇鏡頭光圈
鏡頭的光圈大小決定圖像的亮度,在拍攝高速運動物體、曝光時間很短的應用中,應該選用大光圈鏡頭,以提高圖像亮度。
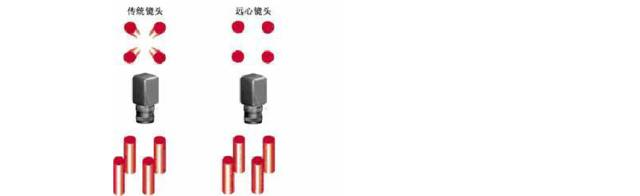
4.選擇遠心鏡頭
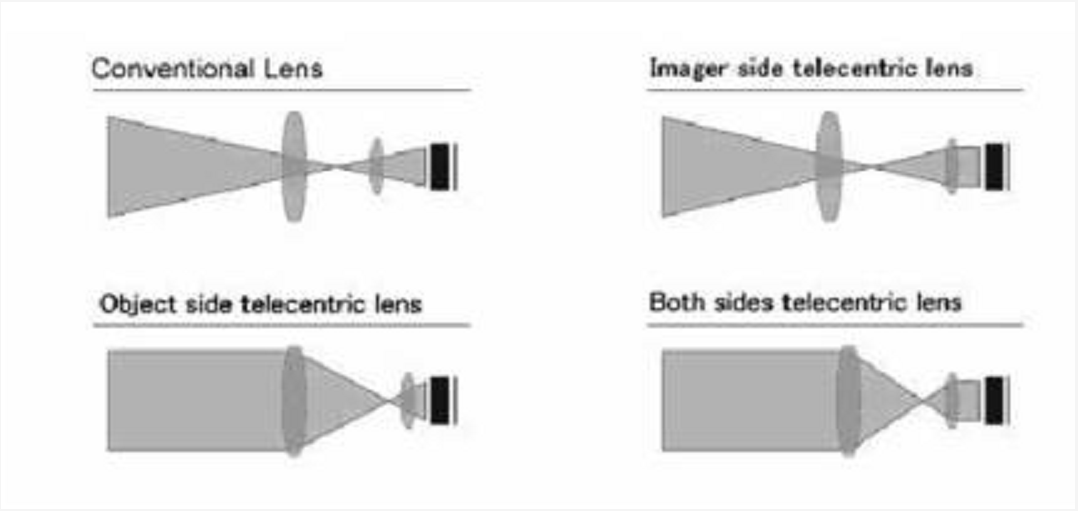
遠心鏡頭是為糾正傳統鏡頭的視差而特殊設計的鏡頭,它可以在一定的物距范圍內,使得到的圖像放大倍率不會隨物距的變化而變化。遠心鏡頭與傳統鏡頭對比,如圖:
遠心鏡頭又分為物方遠心和雙側遠心兩種,如圖:
機器視覺的鏡頭選擇創造不同
機器視覺為工業控制系統增加了新的維度,它可以提供裝配線上零件的尺寸、位置和方向。而合適的鏡頭選擇對于機器視覺能否發揮應有的作用是非常重要的。
機器視覺在控制工業流程當中的作用越來越重要了,尤其是在機器人引導、目標識別和質量保證等領域。當前優秀的視覺系統已經超出了那些基本功能(例如辨別零件和確定方向)的范疇,還可以提供后續功能的信息,比如將物體從一個位置移至另一個。
對于裝配線和大量檢測操作中使用的機器人系統,比如汽車生產和檢測線,傳送帶通常是參考。這里,機器人執行兩項任務:識別和傳送。
在絕大多數機器視覺應用里,光學控制都是非常重要的。機器人視覺系統同樣要求極高的可重復性,因此減少抖動提供清晰圖像是必要的。
在類似藥品工廠這樣的大規模單位檢測線上,視覺系統必須能夠辨識缺陷包、不可讀標簽和產品缺失。視覺系統必須能夠以極高的準確度快速識別和測量方形、圓形和橢圓形物體。提高機器視覺系統的精確度,可以幫助保持統一的包裝表面和顏色。對于食品檢測系統,產品的尺寸、顏色、密度和形狀都需要依靠多元檢測才確定。多元機器視覺系統既可以是彩色相機也可以是黑白相機,通常使用結構照明方法建立產品外表和內在結構。
盡管照相機、分析軟件和照明對于機器視覺系統都是十分重要的,可能最關鍵的元件還是成像鏡頭。系統若想完全發揮其功能,鏡頭必須要能夠滿足要求才行。當為控制系統選擇鏡頭的時候,機器視覺集成商應該考慮四個主要因素:
1.可以檢測物體類別和特性;
2.景深或者焦距;
3.加載和檢測距離;
4.運行環境。
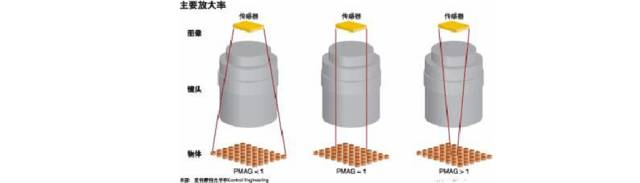
主要放大率是指傳感器上圖像尺寸對于實際物體大小的比例。
物體特性
在為機器視覺系統選擇鏡頭之前,系統集成商必須確定物體和分析環境。這個可視區域叫做無遮擋視場(FOV),它可以使用豎直和水平兩個角度進行測量。通常,豎直方向和水平方向尺寸的比例是4:3,這個比例取決于照相機傳感器工作區域的尺寸。傳感器的大小對于確定無遮擋視場所需要的主要放大率(PMAG)是非常重要的。PMAG是由傳感器尺寸與FOV相比得到,是鏡頭的工作成效。當確定鏡頭是否合適的時候,這一點需要考慮。


物體的特性也很重要。鏡頭對于物體特征的解析能力依賴于特征的對比是否強烈。確定系統解析度、或者物體最小更解析特征的方法,可以使用諸如倫奇刻線法這樣的解像力方法。這些刻線法以線耦(等寬度的一條黑線和一條白線)來決定特征。其他的解像力方法還可以用圓圈和點狀網格。
鏡頭在指定光線條件下辨識特定寬度的線耦或者點距的能力,決定了它的解析度。解析度通常被模塊轉換功能(MTF)以圖像的方式顯示出來。圖形顯示了指定線耦頻率下可行的相對對比度。扭曲、色差和其他波前畸變都會影響曲線的斜率,使曲線偏離理想狀態或者衍射極限的光學表現。鏡頭方案有時候會以每毫米線耦數量(lp/mm)為單位列出物體解析度,再將這個值除以1000就可以預測出鏡頭每微米的物體解析度。
在進行表面剖析的時候,通常不只使用一臺照相機和鏡頭,而了解鏡頭的內在偏差(aberration)量也是有價值的。偏差是指鏡頭里的光學誤差,可以引起同一張圖片里不同點的圖像質量差異。剖析通常包括激光線和其他圖像里的光線,這樣可以確保測量的準確性。一些軟件程序可以消除諸如鏡頭引起的扭曲之類的誤差,所以在最終圖像里只有剖析數據是明顯的。
大型格式和區域掃描照相機鏡頭是控制應用優秀的解決方案,因為它具有高解析度、低扭曲和有限色差。大范圍FOV和兼容性,以及大型格式傳感器,使這些鏡頭在Web、LCD、食品和飲料行業的應用具有很高的價值。
鏡頭是機器視覺系統性能的主要決定因素。
距離約束
自動化機器視覺系統和裝配線所需的空間差異很大,可以只有幾米,也可能需要一整座廠房。所謂的工作距離,是指當圖像在焦距范圍內的時候,物體和照相機鏡頭前端的距離。它限制了視覺系統以及和視覺系統一起工作的設備所需要的空間。有一些應用,比如通過真空爐端口觀察,工作距離非常靈活,近焦鏡頭和長工作距離視頻顯微鏡頭都可以使用。其他的應用,比如強電微觀檢測,工作距離就只有幾個英寸。
在極限范圍內,通過鏡頭重新對焦,可以改變工作距離。無限共軛鏡頭的對焦距離可以從最小工作距離一直到無限遠,有限共軛鏡頭則有一個特定工作距離范圍。
存放和加載限制,包括用于艱苦環境的保護外殼,必須具有足夠的柔性,可以根據工作距離進行調整。比如在很多安裝場合,感興趣的產品區域和產品線可能在檢測過程中發生變化,這就要求視覺系統和視覺元件可以根據若干種傳感條件進行調整。很多照相機鏡頭需要平穩加載,但是當物體空間(物體和鏡頭之間的距離)受到限制,改變像空間(image space,鏡頭與圖像之間的距離),就可以改變工作距離。
像空間可以使用兩種方式進行改變:通過縮放功能或者隔離。縮放鏡頭可以調整照相機系統的視場,而不需要改變工作距離。一些縮放系統的元件可以定制組成特殊型號的系統。度量衡和顯微應用需要以微米為單位進行放大,這些鏡頭系統可以同顯微鏡下的物體對應。縮放鏡頭保持著高解析度,但是成本高昂。另外一種方案,鏡頭隔離器十分經濟,并且可以縮短工作距離、減小鏡頭的可視范圍。然而不幸的是,這會帶來扭曲同時降低解析度。因此,除非空間調整是在5mm之內或者鏡頭的設計就帶有隔離器,否則隔離器不是一個推薦的方案。
存放和加載限制,包括用于艱苦環境的保護外殼,必須具有足夠的柔性,可以根據工作距離進行調整。比如在很多安裝場合,感興趣的產品區域和產品線可能在檢測過程中發生變化,這就要求視覺系統和視覺元件可以根據若干種傳感條件進行調整。很多照相機鏡頭需要平穩加載,但是當物體空間(物體和鏡頭之間的距離)受到限制,改變像空間(image space,鏡頭與圖像之間的距離),就可以改變工作距離。
像空間可以使用兩種方式進行改變:通過縮放功能或者隔離。縮放鏡頭可以調整照相機系統的視場,而不需要改變工作距離。一些縮放系統的元件可以定制組成特殊型號的系統。度量衡和顯微應用需要以微米為單位進行放大,這些鏡頭系統可以同顯微鏡下的物體對應。縮放鏡頭保持著高解析度,但是成本高昂。另外一種方案,鏡頭隔離器十分經濟,并且可以縮短工作距離、減小鏡頭的可視范圍。然而不幸的是,這會帶來扭曲同時降低解析度。因此,除非空間調整是在5mm之內或者鏡頭的設計就帶有隔離器,否則隔離器不是一個推薦的方案。
這樣解析度和對比度都會受到不好的影響。出于這個原因,DOF同指定的解析度和對比度相配合。當景深一定的情況下,DOF可以通過縮小鏡頭孔徑(也就是增加F/#值)來變大,同時也需要光線增強。
鏡頭的DOF范圍取決于有效焦距、可接受的模糊直徑。有一些鏡頭被設計成超焦或者可超焦的,這就意味著焦內的遠點可以拓展到無限遠。這種技術通常應用在定焦鏡頭上,景深效果很深,但是卻可以通過虹膜的幫助進行調整。
不要把遠心鏡頭和大景深鏡頭弄混了。遠心鏡頭可以使機器視覺系統控制放大率、消除潛在誤差,所以同尺寸的物體在照片上高度都是一致的,無論它距離照相機有多遠。這種鏡頭一個實際應用的例子是分析計算機電路板。遠心鏡頭通常有一個工作距離范圍,在每一個工作距離點形成有限的景深。集成商在為一個項目選擇遠心鏡頭的時候,既需要考慮工作距離范圍,還需要考慮景深效果。
在很多情況下,比如說管道檢測,可以使用變焦鏡頭獲得較大的景深。變焦鏡頭和縮放鏡頭很類似,應用在需要經常變換焦距的場合。這些鏡頭經常是馬達驅動的,可以保證在對焦平面上平滑移動。使用這樣的鏡頭,整個管道、每一個環節都可以掃描到,通過調整焦距來發現每個缺陷。然而,同縮放鏡頭不通,變焦鏡頭的工作距離也可以變化,可以根據需要進行重新定位。
USAF目標法展示了不同的寬度的倫奇刻線,可以衡量鏡頭的性能。
獨立平臺可以減少振動
環境的重要性
機器視覺系統的環境因素包括物體反射系數、光線、溫度、振動和污染物。物體的反射會導致高光,還可能使特征模糊。鏡頭外殼和遮光罩中的障板可以降低光散引起的高光現象。障板為不透明的圓片,為鏡頭的中心孔徑特別設計,可以限制到達傳感器的光線。極化或者散射光源同樣也可以避免物體反射出現的熱點。
光,尤其是單色光,可以使物體的對比度提高,使鏡頭圖像的質量最大化。在使用黑白照相機的時候,對比度是非常重要的,可以通過加減過程產生。在加法過程中,單色光源和照相機鏡頭濾鏡同分析物體所在的媒介顏色相匹配,物體周圍的區域可以反射并且傳輸光線,所以顯得比物體更加明亮。這項技術在凝膠和彩色液體用作背光式觸摸屏或者微粒檢測的應用很有價值。
相反,在減法系統中,濾鏡屏蔽了物體周邊的反射光,這使得物體看起來比周邊明亮。像藥丸檢測這樣的應用,物體的顏色可能是它僅有的特征,這時候就要使用濾鏡。
高溫環境下,可能因為鏡頭里光學元件的熱膨脹出現問題。并不是所有的鏡頭都可以適應溫度變化,在檢測熱物體時,最好使用工作距離比較長的鏡頭。
另外一個要考慮的因素是振動。通常需要將鏡頭裝載到和照相機隔離的平臺和桌面上,來減少振動。重型的照相機鏡頭總是帶有卡具,如果鏡頭不能直接裝在案板或者類似的隔離桌面上,那么就把裝載鏡頭的物體放在獨立平臺上吧。固定在獨立平臺上的機械手就經常用來裝載照相機和鏡頭。
工業換件下的污染物會腐蝕鏡頭表面。極端環境光學(HEO)產品進行了專門設計,即便是長期暴露在嚴酷環境下,也可以提供高質量的圖像。因為它的光學元件是嚴格密封的,HEO產品可以在水下使用,能夠抗腐蝕、防塵,并且不受機械影響。
照相機鏡頭對于機器視覺系統有著深遠的影響。為了實際應用選擇合適的鏡頭,機器視覺集成商必須對物體的尺寸、特征和反射率都要進行分析。他/她還必須要估計工作距離范圍以及物體厚度所需要的景深。當改變物體和圖像間隔的時候,集成商可以使用更加靈活的系統,也可以降低性能。所有的環境都是在不斷變化的,還要符合一定的要求,所以選擇一款合適的鏡頭非常重要。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
