熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A


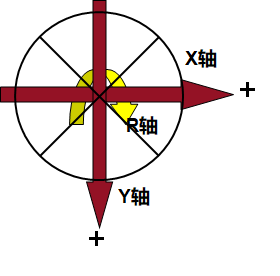
1.一般地,相機像素坐標系符合下圖的關系:
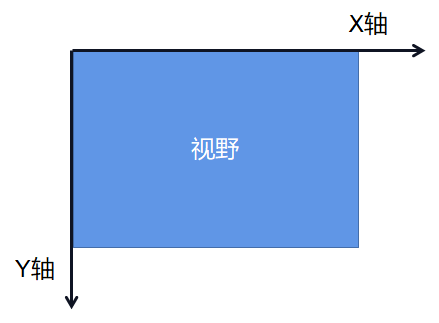
即Y軸的正方向為X軸正方向的右旋轉90度方位,我們的算法是基于這種標準的視覺坐標系的。
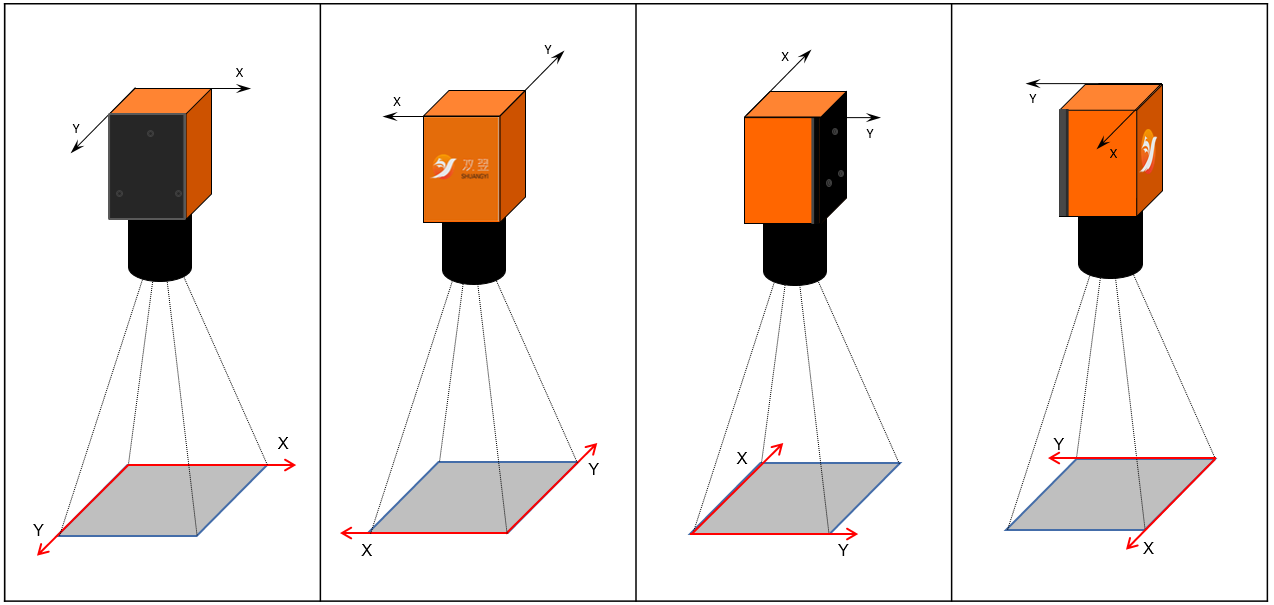
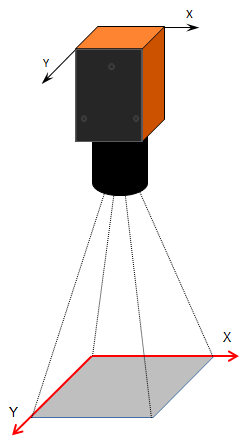
2.實際安裝中,相機的方向不同,相機的坐標系也不同。以操作臺站立的位置為基準,相機自上往下拍時,相機的坐標系如下:
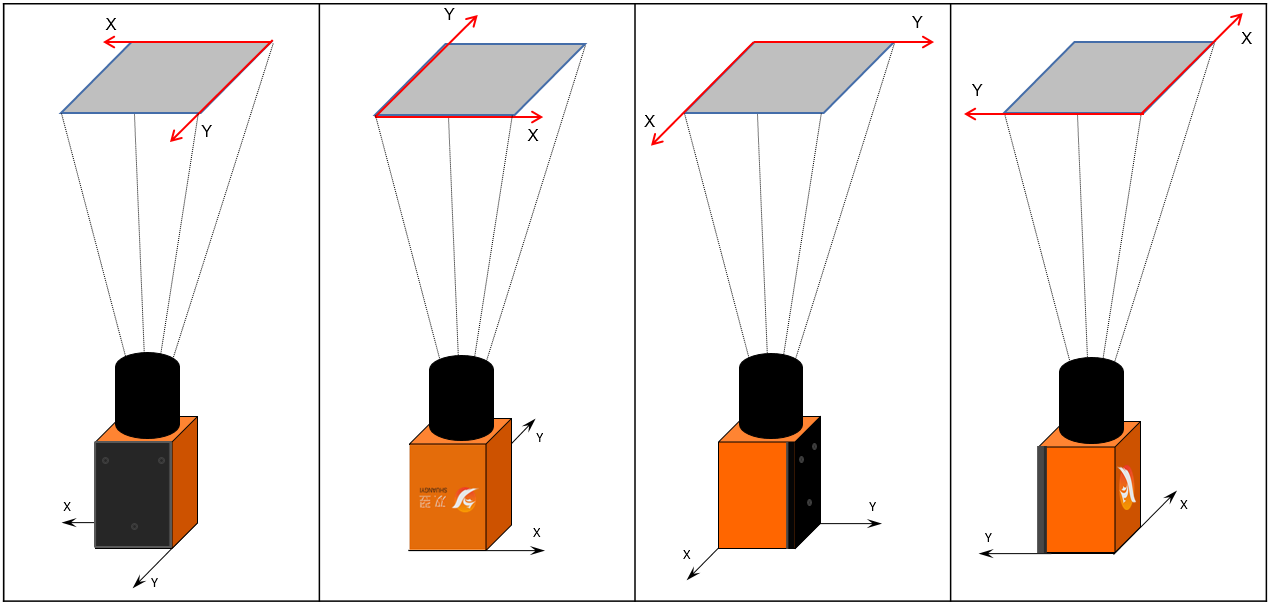
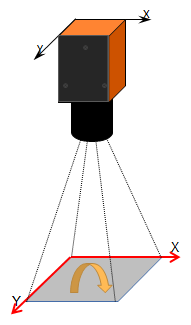
3.以操作臺站立的位置為基準,相機自下往上拍時,相機的坐標系如下:
4.相機方向與顯示器的關系
標準顯示器的畫面坐標系如下:
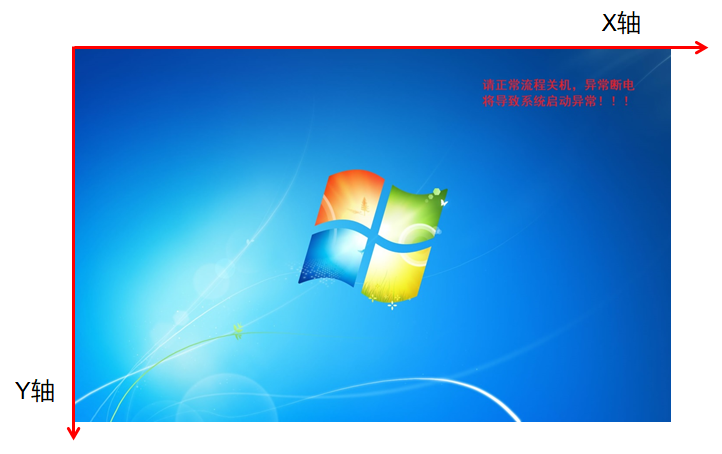
相機安裝方向在滿足實際視野長寬需求的前提下,一般要求符合顯示器的界面坐標,所以相機優(yōu)先如右圖安裝,或者其他方向通過鏡像調整到和顯示器一致的坐標系,以符合操作習慣。
二、對位平臺與相機的關系
我們的對位算法是基于相機與對位平臺同軸同向的基準計算位置坐標的,對于非同軸同向的坐標系統(tǒng),需要告知我們平臺與相機的方向關系。我們用b_CW和b_Y兩個參數(shù)來描述平臺與相機的方向關系。
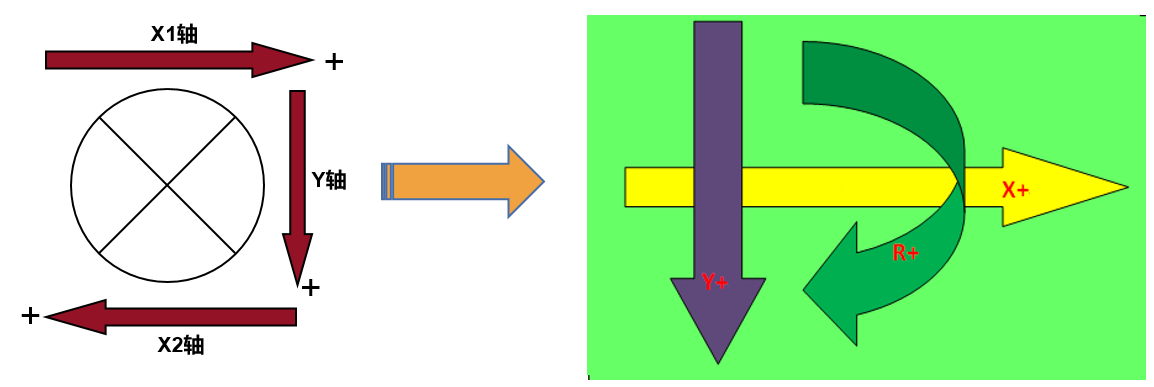
在相機視野中(相機坐標系是常規(guī)的向右X+,向下Y+),當R方向正脈沖指令旋轉時,順時針為true,否則為false!
Y軸和相機Y方向的關系:運動Y軸正方向在運動X軸正方向的順時針90度處,為true, 否則為false!
1.b_CW的判定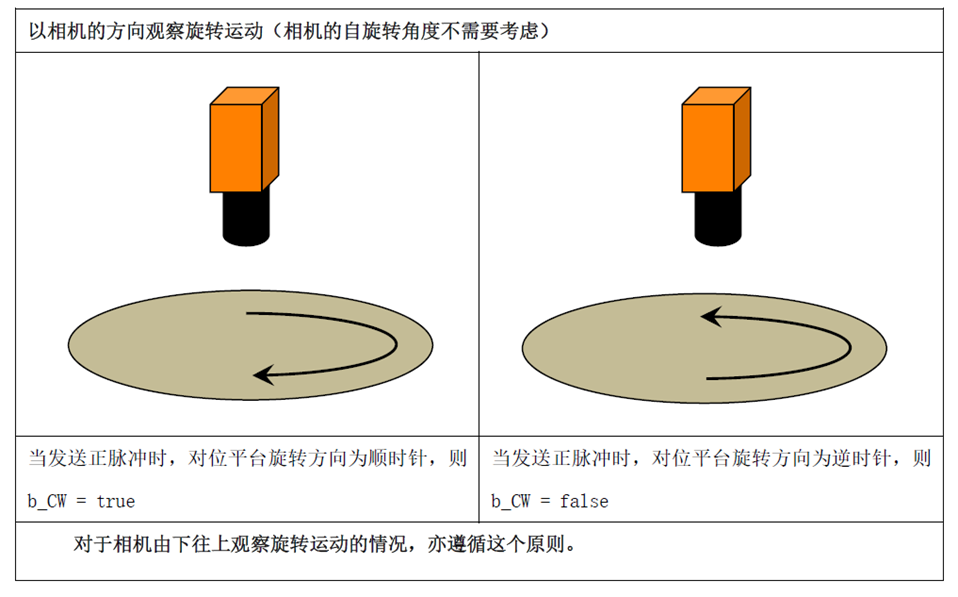
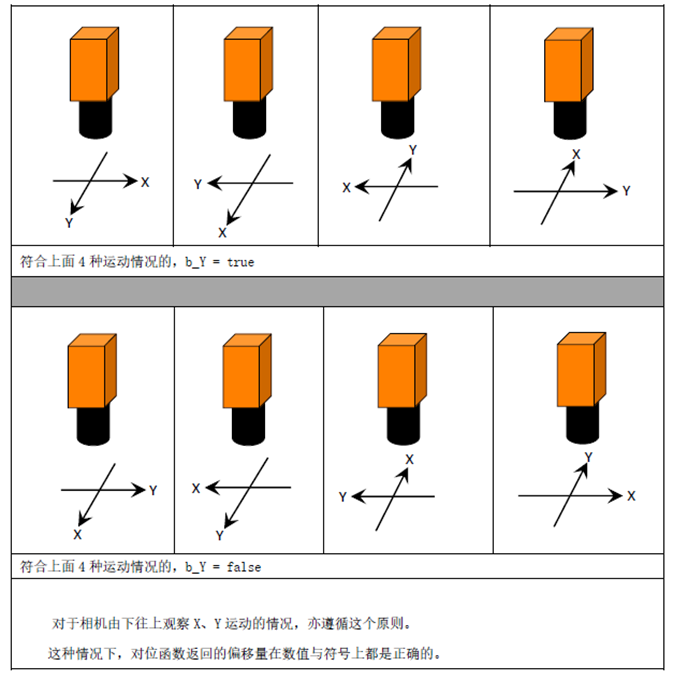
2.b_Y的判定
a.以相機的方向觀察平臺X、Y運動(相機的自旋轉角度不需要考慮),相機能同時觀察X、Y方向的運動情況(標準模型)。
運動Y軸正方向在運動X軸正方向的順時針90度處,為true,否則為false!
b.對于分離式的運動平臺,相機只能觀察到 X 或 Y 的運動情況(不需要考慮相機的自旋轉角度),則按右側原則設置:
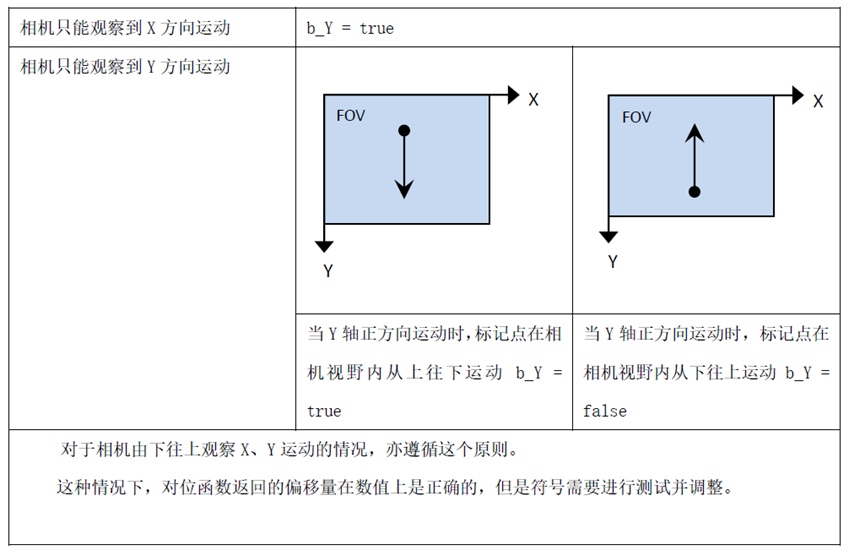
三、平臺類型
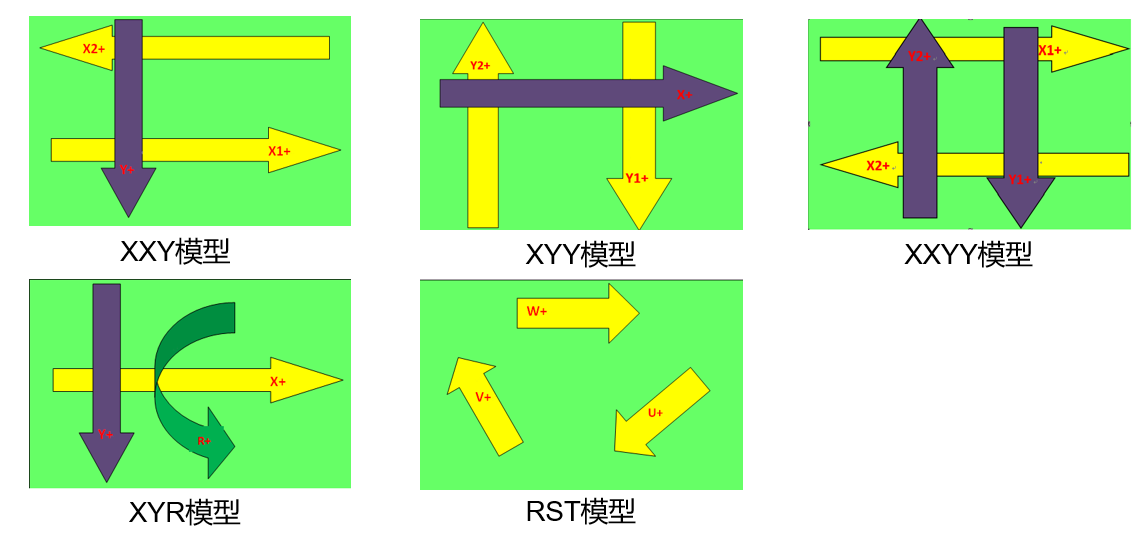
包含對位平臺、SCARA機械手、獨立搭建的XYR模組、分離式XYR模組綜合來看,我們歸納為以下幾種模型:
XYY模型、XXY模型、XXYY模型、XYR模型、RST模型
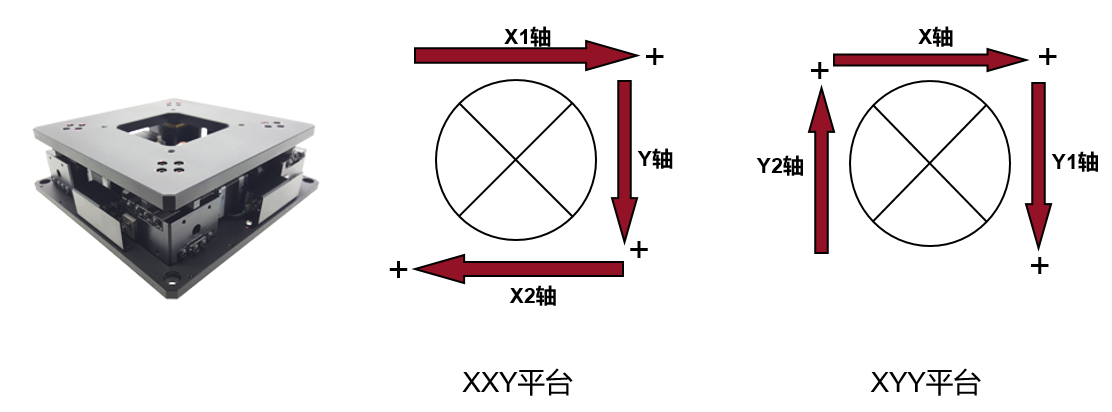
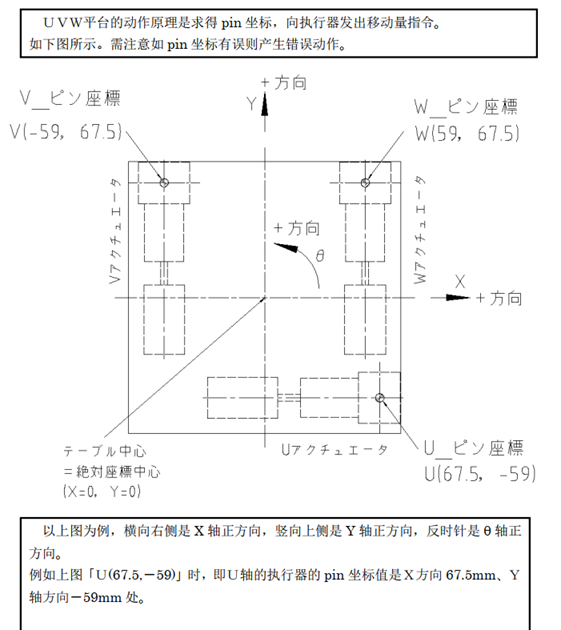
1.UVW平臺
UVW平臺的三軸結構與方向搭配多樣,為了方便控制UVW平臺,我們將UVW平臺定義為XXY型平臺和XYY型平臺,且規(guī)定三軸的正方向同順時針指向或者同逆時針指向。
2.XXYY平臺
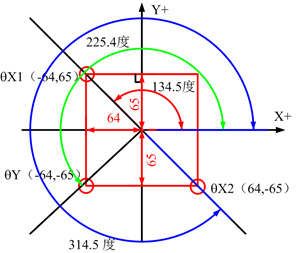
同樣地,對于四軸的 XXYY平臺,我們規(guī)定四軸的正方向為使得平臺順時針方向旋轉的方向,如下圖所示:
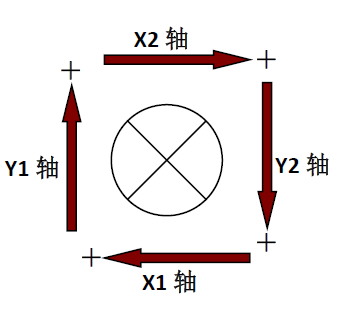
四軸的同方向運動使平臺能作順時針或逆時針旋轉運動。
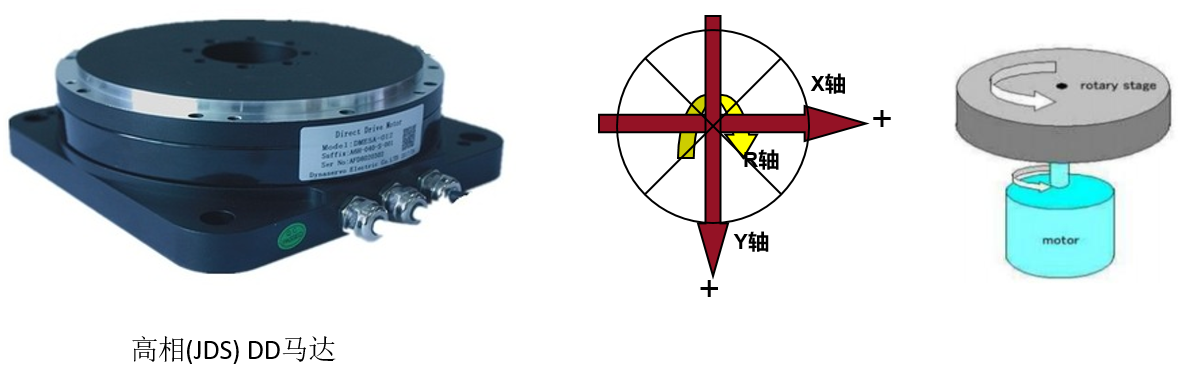
3.Xyθ平臺(R軸為DD馬達)XY軸為常規(guī)模組,旋轉軸為DD馬達直驅帶動平臺旋轉。
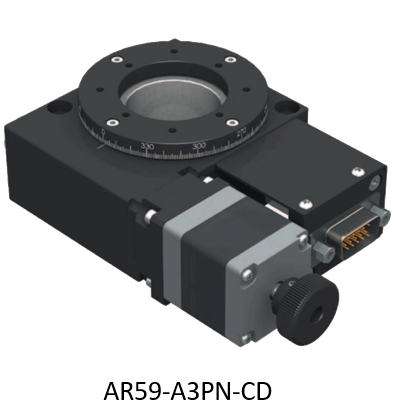
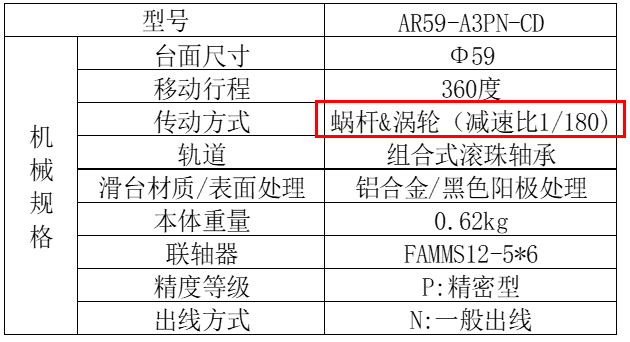
4.Xyθ平臺(R軸為蝸輪蝸桿方式)
XY軸為常規(guī)模組,旋轉軸為蝸輪蝸桿方式帶動平臺旋轉。

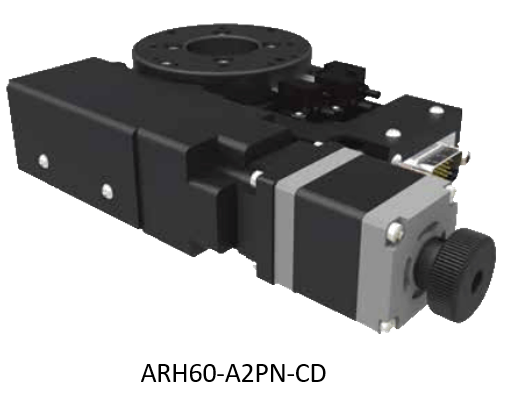
5.Xyθ平臺(R軸為絲桿側推方式)
XY軸為常規(guī)模組,旋轉軸為絲桿側推方式帶動平臺旋轉。

6.XYR模組(獨立搭建的XYR模組)
XYR三軸都為模組電機搭建而成,構成XYR機械手。

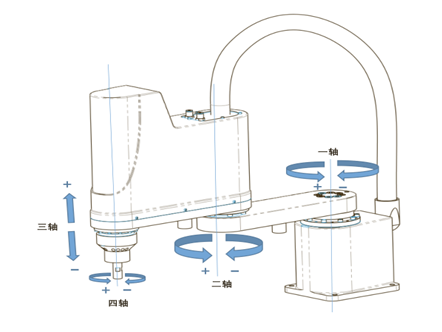
7.SCARA機械手
標準的水平關節(jié)機械手,其結構模型雖然不是XY軸正交加旋轉軸的模型,但是其標準的直角坐標系是符合XYR的正交模型,水平3軸聯(lián)動是可以按照直角坐標系運動的。

四、平臺的控制
對于運動平臺,如果我們需要控制XY方向的移動,我們就需要了解平臺XY絲桿的螺紋距和驅動器的細分。如果我們需要控制平臺旋轉,除了以上兩個信息我們還需要了解平臺的半徑,平臺的結構類型。
按照前面講到的平臺類型,我們總結如下:

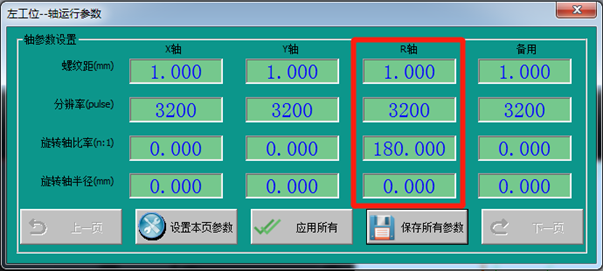
MasterAlign-控平臺和MasterAlign-通訊軟件中用于描述平臺類型和平臺半徑的是:
旋轉軸比率和旋轉軸半徑兩個參數(shù)。
總結幾種對位平臺的旋轉軸比率和半徑如下:
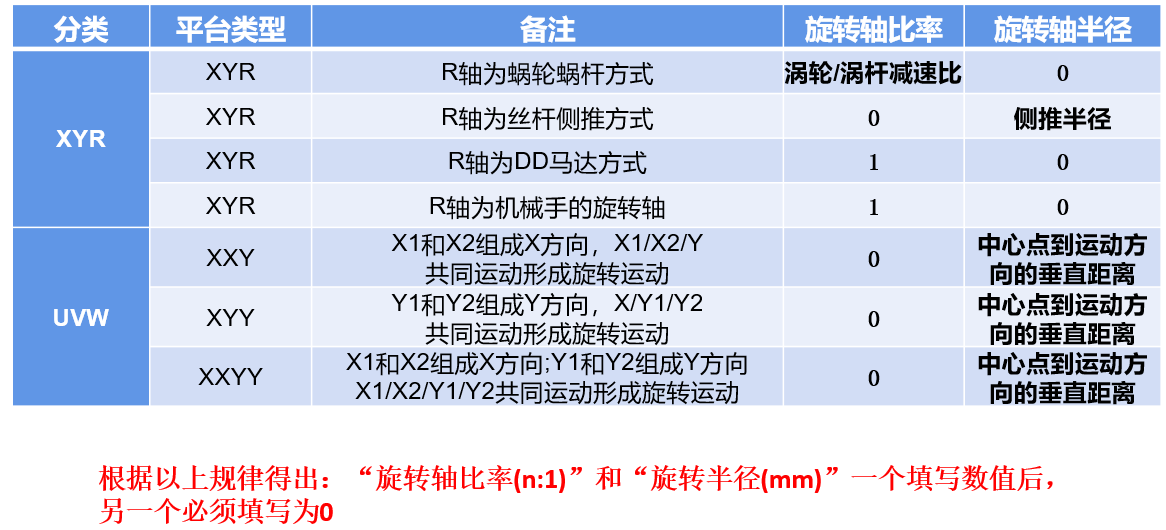
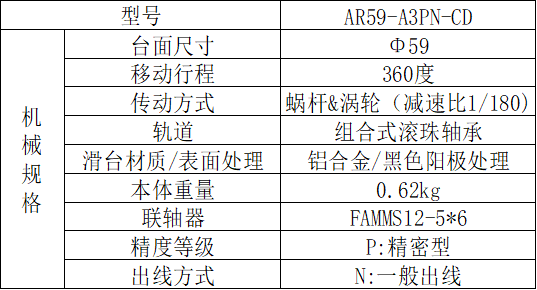
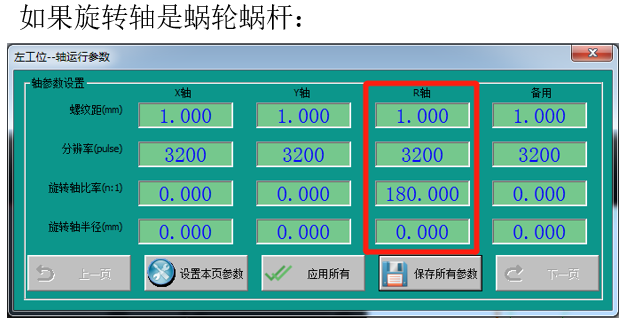
我們選用的旋轉平臺為AR59-A3PN-CD,其蝸桿/渦輪減速比為1/180,表示蝸桿轉1圈,渦輪轉1/180圈。如我們選用的電機分辨率為3200Pulse/Rev,那么渦輪轉動一圈需要180*3200Pulse=576000Pulse/Rev。該旋轉機構角度分辨率則為360度/576000=0.000625度/脈沖

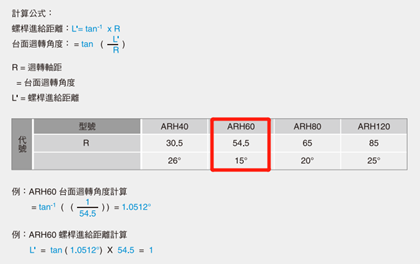
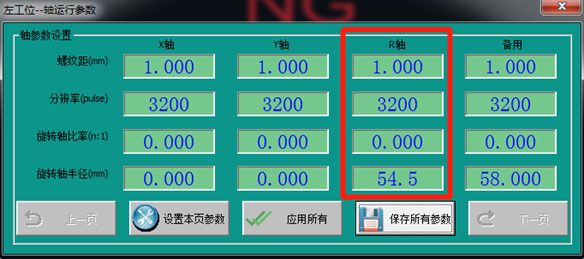
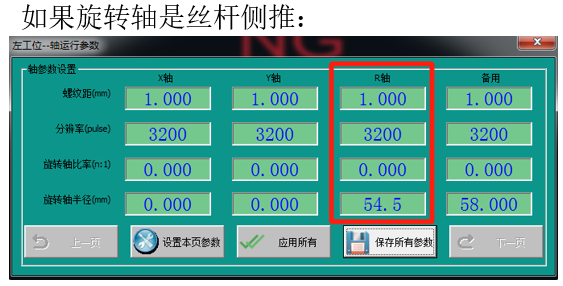
2.旋轉軸為絲桿側推方式
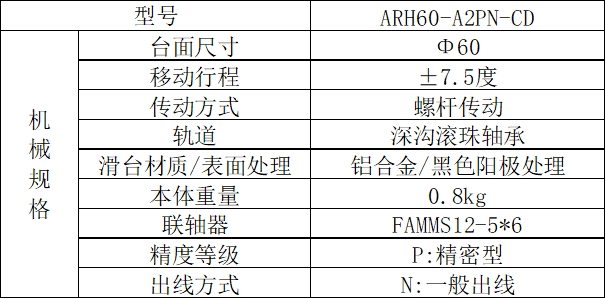
我們選用的旋轉平臺為ARH60-A2PN-CD,其絲桿螺距為1mm,如我們選用的電機分辨率為3200Pulse/Rev,平臺的側推半徑為54.5mm,旋轉軸比率為0。則旋轉角度為: θ=tan(L/R)側推電機旋轉一圈,平臺角度擺動:θ=tan(1mm/(54.5mm))=1.0512°

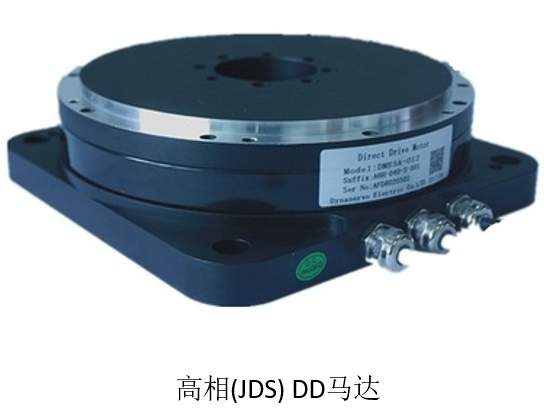
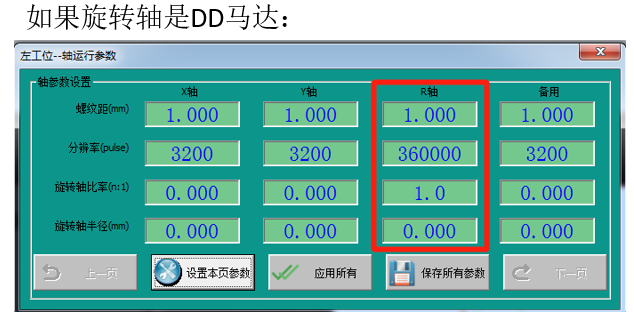
3.旋轉軸為DD馬達方式
如果我們選用的旋轉平臺為DD馬達,馬達分辨率為360000Pulse/Rev,那么DD馬達角度分辨率則為360度/360000=0.001度/脈沖
4.XXY/XYY/XXYY對位平臺
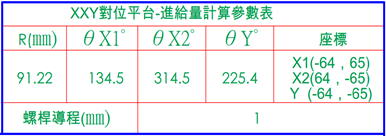
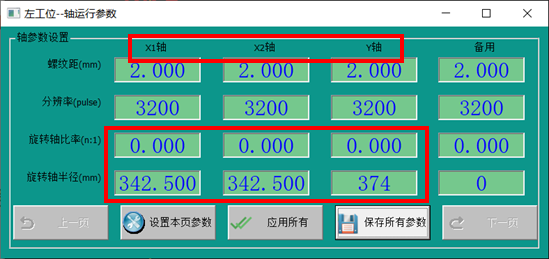
XXY平臺的X方向運動,由X1和X2軸同時運動相同距離形成,Y方向運動由Y軸獨立運動形成,旋轉運動由3軸同時正向或者負向運動相等距離形成;
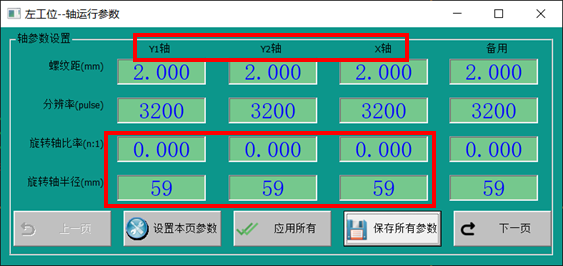
XYY平臺的Y方向運動,由Y1和Y2軸同時運動相同距離形成,X方向運動由X軸獨立運動形成,旋轉運動由3軸同時正向或者負向運動相等距離形成;
XXYY平臺的X方向運動,由X1和X2軸同時運動相同距離形成,Y方向運動由Y1和Y2軸同時運動相同距離形成,旋轉運動由4軸同時正向或者負向運動相等距離形成,鑒于4軸平臺控制要求的難度,也有松掉其中一個軸的使能當作UVW平臺控制,運動完成后再激磁。
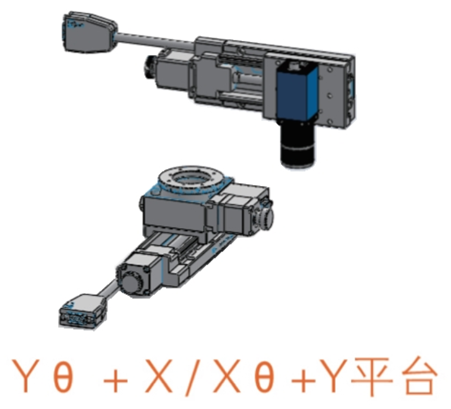
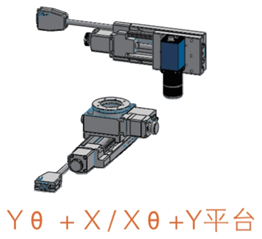
5.XR+Y和YR+X分離結構
XR+Y和YR+X分離結構式的平臺控制與XYR平臺一致,由于結構分離,在執(zhí)行樣本糾偏的時候,可能會存在樣本的交接,需要注意的是平臺是否能夠完成視覺的多次對位和復檢。
無論什么類型的運動平臺,最終都會轉換成XYR模型進行控制,一般要求設置成與相機同軸同向(包括相機上照和相機下照),我們在此基礎上分析相機與平臺的關系:b_CW、b_Y。
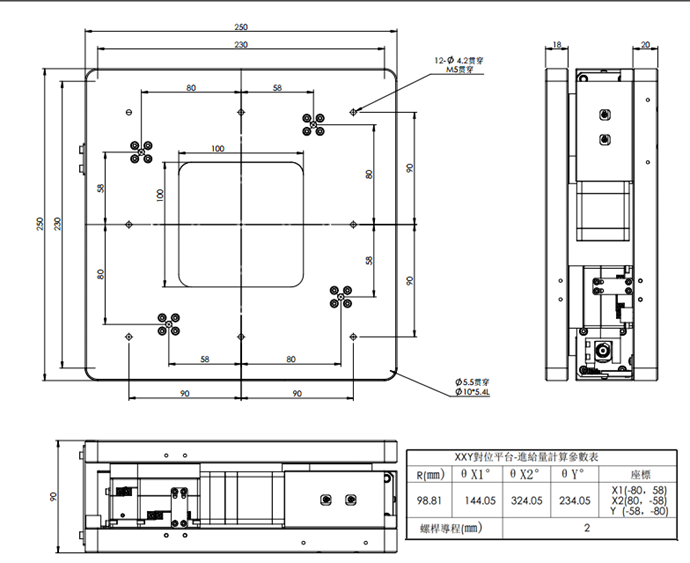
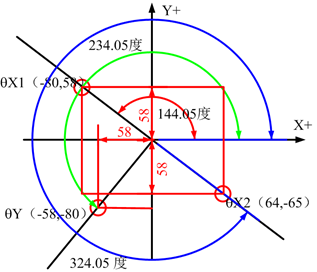
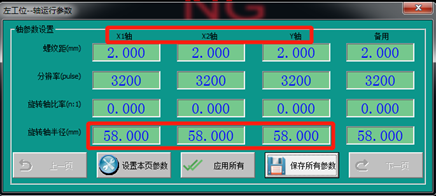
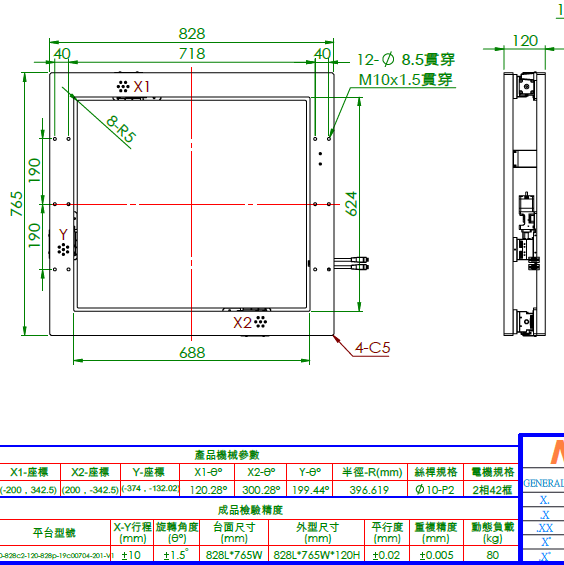
五、平臺參數(shù)范例
1.平臺參數(shù)范例-1
2.平臺參數(shù)范例-2
3.平臺參數(shù)范例-3
4.平臺參數(shù)范例-4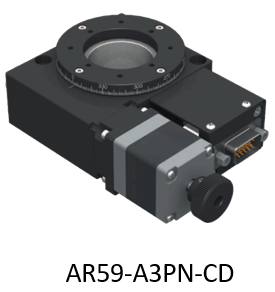
5.平臺參數(shù)范例-5

6.平臺參數(shù)范例-6

7.平臺參數(shù)范例-7
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A
