熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


功能概述
跟隨工藝是跟蹤移動的物體,以移動的物體為參考規劃機器人的運動,傳送帶跟隨是跟隨工藝中的一種典型應用。傳送帶跟隨是通過視覺或光電傳感器檢測到傳送帶上的物體,實時跟蹤移動的物體,以移動的物體為參考坐標系,進行軌跡和點位運動。
工作流程
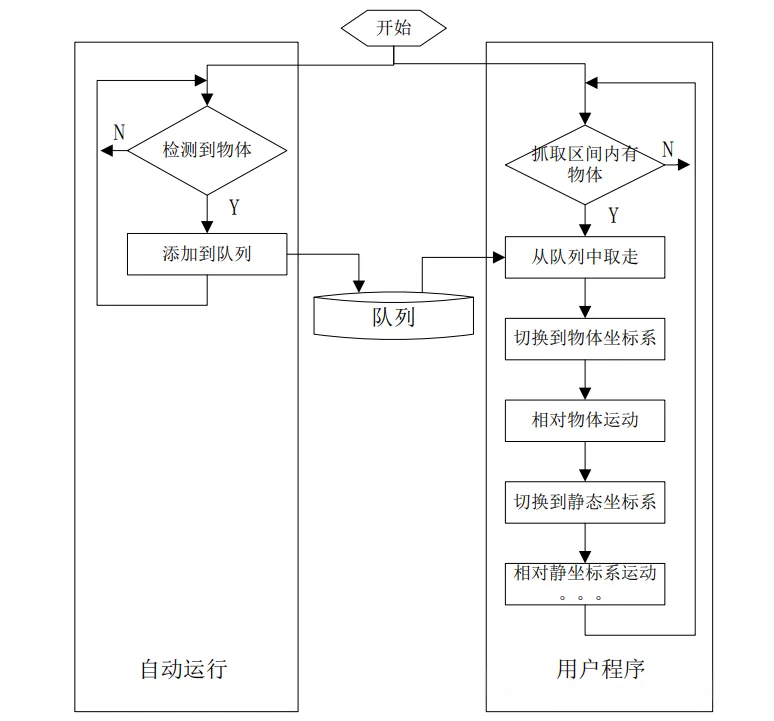
跟隨工藝工作過程主要分兩部分:檢測和跟隨運動。檢測是通過視覺或光電傳感器獲得物體在傳送帶上的位置,將獲得的物體位置信息放入傳送帶對象隊列中,并通過編碼器反饋跟蹤其位置的變化;跟隨運動是以隊列中移動物體為參考坐標系的機器人運動。檢測與跟隨運動并行處理,具體流程如下圖所示。
位置描述體系
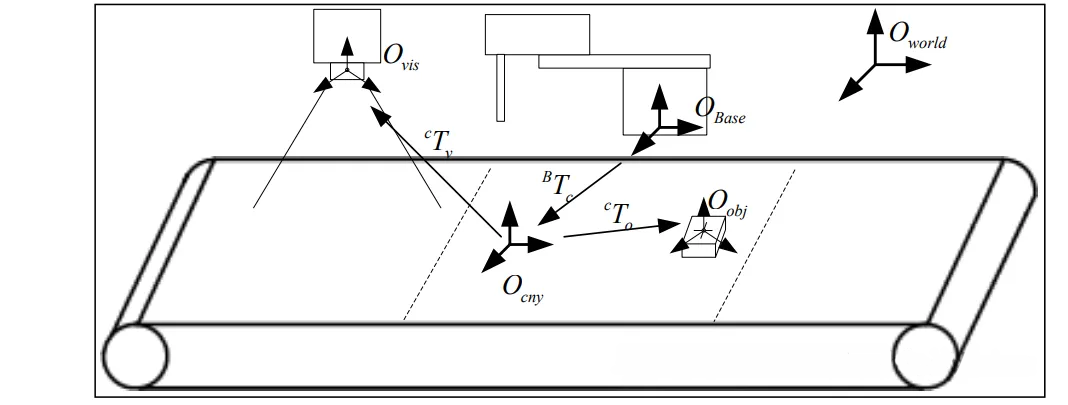
跟隨運動以物體坐標系為參考系,物體坐標系(Oobj)是固連在物體上隨物體移動的坐標系,是動態坐標系。物體坐標系描述了物體在傳送帶上的位置和方向,是物體基準點在傳送帶坐標系下的坐標。傳送帶坐標系(Ocny)表示傳送帶在機器人基坐標系下的位置和方向,用于描述傳送帶與機器人之間的相對關系,傳送帶坐標系是靜態的。傳送帶視覺中的視覺坐標系(Ovis)描述了相機與傳送帶之間的位置轉換關系。通過相機獲得了物體在傳送帶上的瞬時位置,通過編碼器實時獲得物體在傳送帶上的運動量,從而實現機器人對物體位置的實時追蹤。跟隨工藝中各坐標系之間的關系如下:
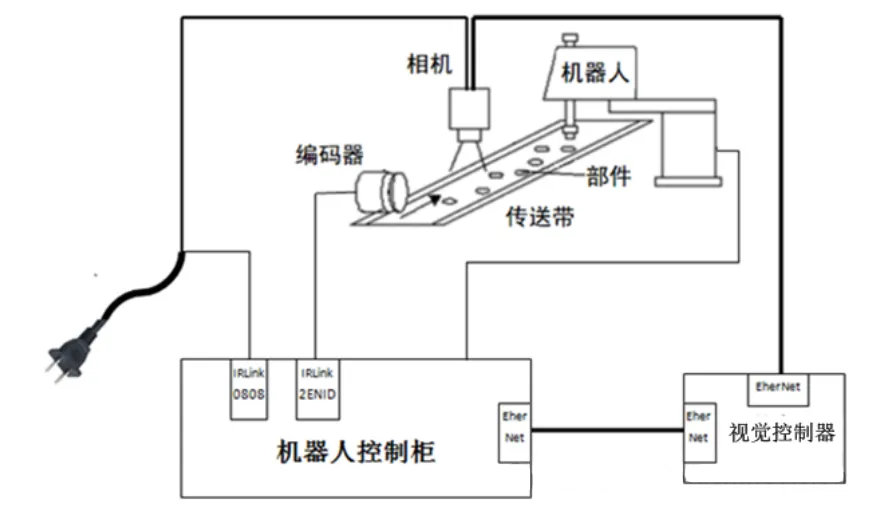
硬件配置
重點知識
1、需采用脈沖型編碼器;
2、如果使用視覺檢測,相機觸發必須采用硬件觸發的方式。
3、工件高度設置:視覺或傳感器都不能檢測到工件的高度,需要通過參數設定指定每種工件類型的高度。工件高度值是工件基準點(物體坐標系原點)在傳送帶坐標系下的Z坐標值。
4、拍照間距的設置原則:保證能拍全傳送帶上的每個物體標識,保證不漏拍。如果設置的拍照間距等于相機視野寬度,相機前后兩次拍到的畫面無縫銜接,此時能拍全傳送帶上的每一部分,如果某個物體剛好位于前后兩次拍照的銜接處,則前后兩次各拍到此物體的一半,此物體不能被識別。如下圖所示,第一次拍照時工件位于虛線位置,第二次拍照時工件運動到了右側的實線位置,前后兩次拍照都不能識別到工件A。
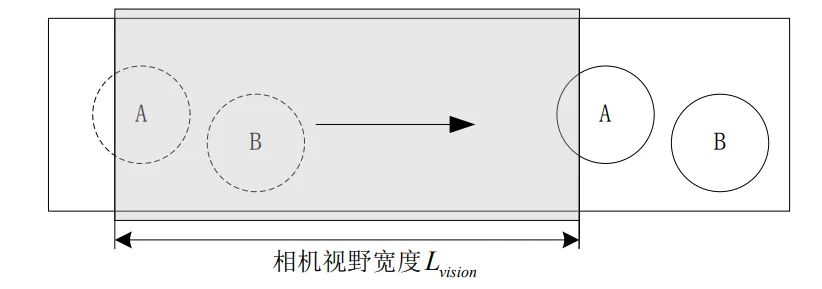
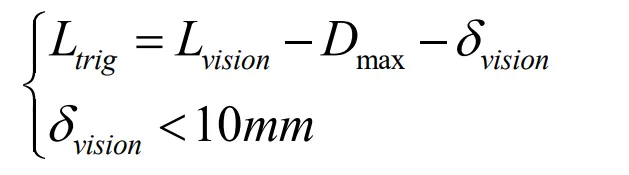
為了避免這種情況,前后兩個畫面應略有重疊,重疊寬度大于物體標識的最大寬度,實現至少有一次拍照是完整的,如下圖所示。
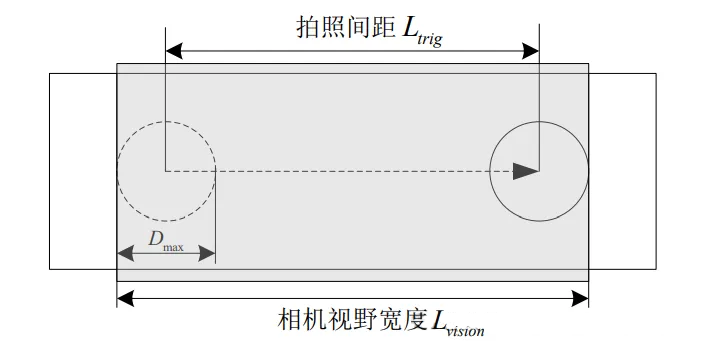
視覺必須在一個拍照周期內完成圖像識別,拍照周期=拍照間距/傳送帶速度,拍照間距設置過小會導致拍照周期變短,要求視覺的處理速度更快,因此在滿足不漏拍的前提下拍照間距盡量大。綜合各方面需求,拍照間距不能太大也不能太小,可按下列公式給定,其中Ltrig為拍照間距,Lvision為視野寬度,Dmax為物體識別標識最大寬度, 為設置余量。
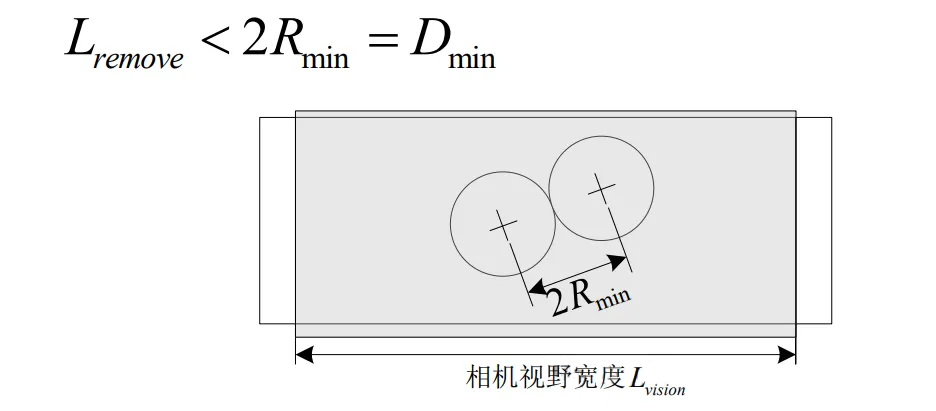
5、重復檢測判定距離:按上述拍照間距設置原則,前后兩次拍照畫面有重疊,這有可能導致同一個物體在前后兩次拍照中同時被識別,造成重復,此時需要剔除其中一個。控制器內部會對前后兩次拍照物體的位置進行比較,如果兩個物體的距離小于重復檢測判定距離,認為是重復,剔除后一次拍照得到的物體。重復檢測判定距離的設置原則是正確識別重疊的同一物體和正常靠近的兩個物體。如下圖所示,當兩個物體距離大于2Rmin時可認為是兩個物體,否則認為是同一個物體,因此重復剔除距離按如下原則設置:
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
