熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


MasterAlign全景視覺引導應用軟件
MasterAlign全景視覺引導應用軟件提供一種全景視覺引導的智能合機器視覺圖像處理方法,提供建模工具,快速提取圖像中的待處理物件邊緣點像素坐標信息。并結合視覺與運動執行結構的標定,轉換為機械坐標信息,從而實現快速的產品換型,引導執行機構進行加工、搬運等,大大提高的生產效能。
MasterAlign全景視覺引導應用軟件采用視覺引導,與現有的技術方法相比,利用視覺引導及利用建模工具,加快了產品邊緣點像素獲取并轉換成執行機構坐標,減少換型消耗的時間。利用建模工具的亞像素提取輪廓能力,提高了待處理產品的位置精度。本方法已于實際生產加工流程中發揮其有效的作用
1、全景抓取物料,減少產品換型帶來繁瑣操作的困擾
2、快速兼容運動中引導機械手精準抓取物料
3、全景視覺引導應用于不同行業的物料抓取應用
MasterAlign全景視覺引導應用軟件應用案例
MasterAlign全景視覺引導應用軟件配合機械手案例(多目標帶角度抓取)
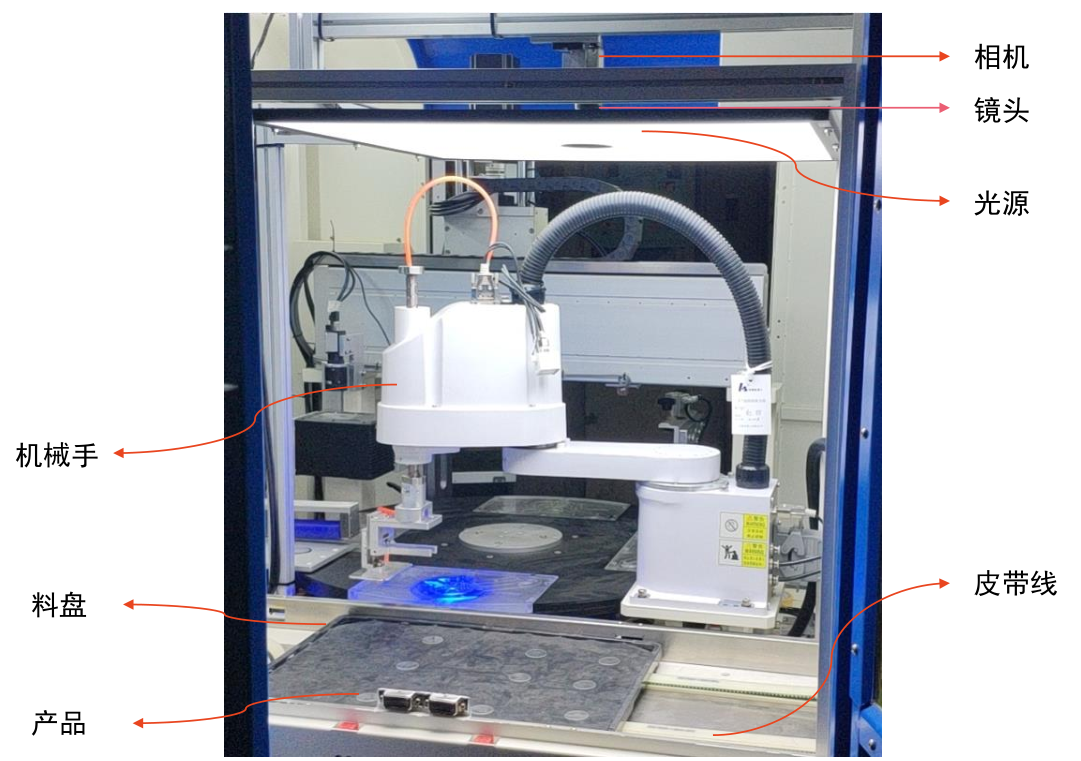
系統架構
視覺定位系統采用打正向光方式,光源在機械手上方,CCD從上往下拍攝,進行圖像分析定位。相機將計算出的像素坐標轉換為機械手的物理坐標,視覺軟件與機械手進行網口通訊,將視野內物料的物理坐標發送給機械手,機械手抓取物料放在指定工位。

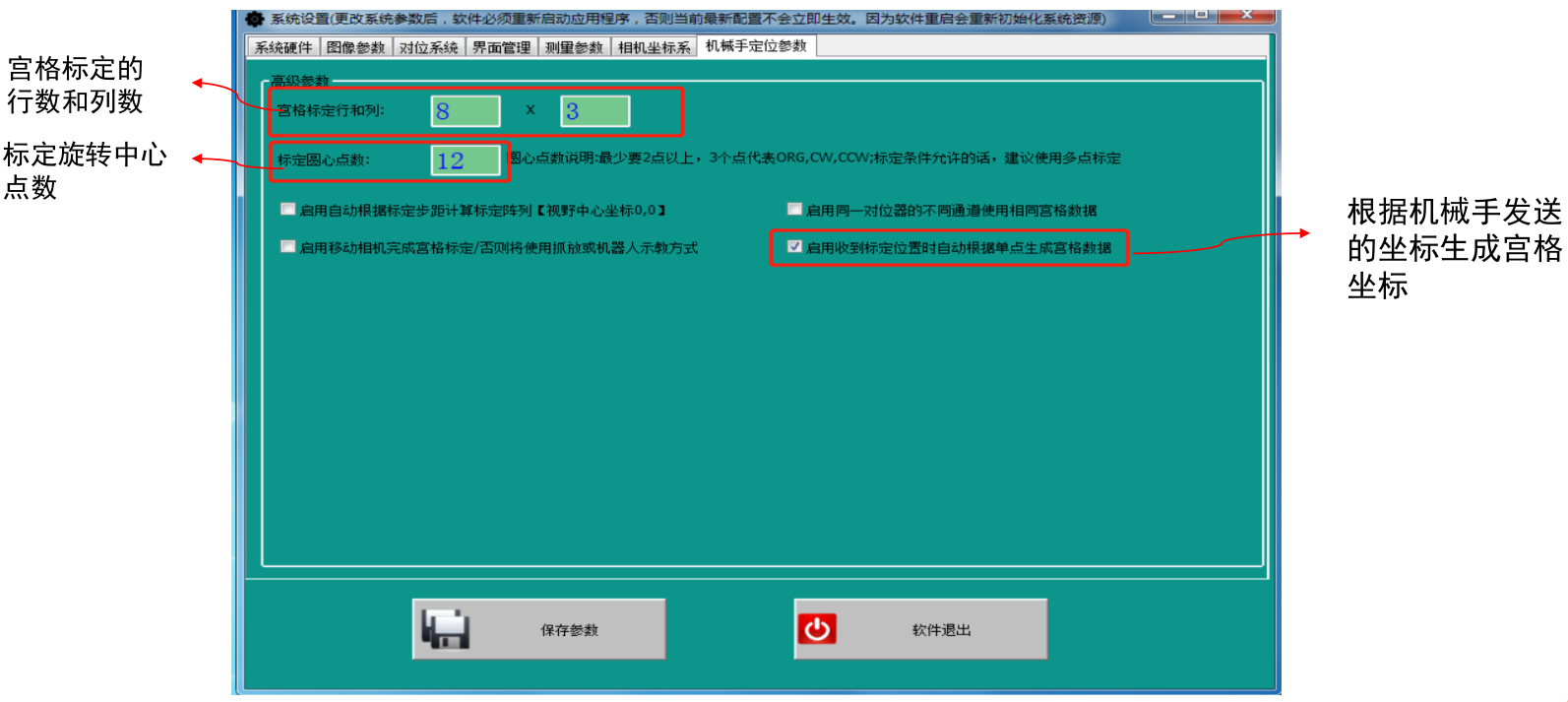
系統采用宮格標定,自定義行列數和間距及旋轉角度,通過機械手發送的當前機械坐標,視覺軟件自動計算出宮格機械坐標,視覺軟件與機械手進行網口通訊,機械手吸取物料到達指定的機械坐標,相機拍攝物料計算出像素坐標和機械坐標的關系。
系統配置
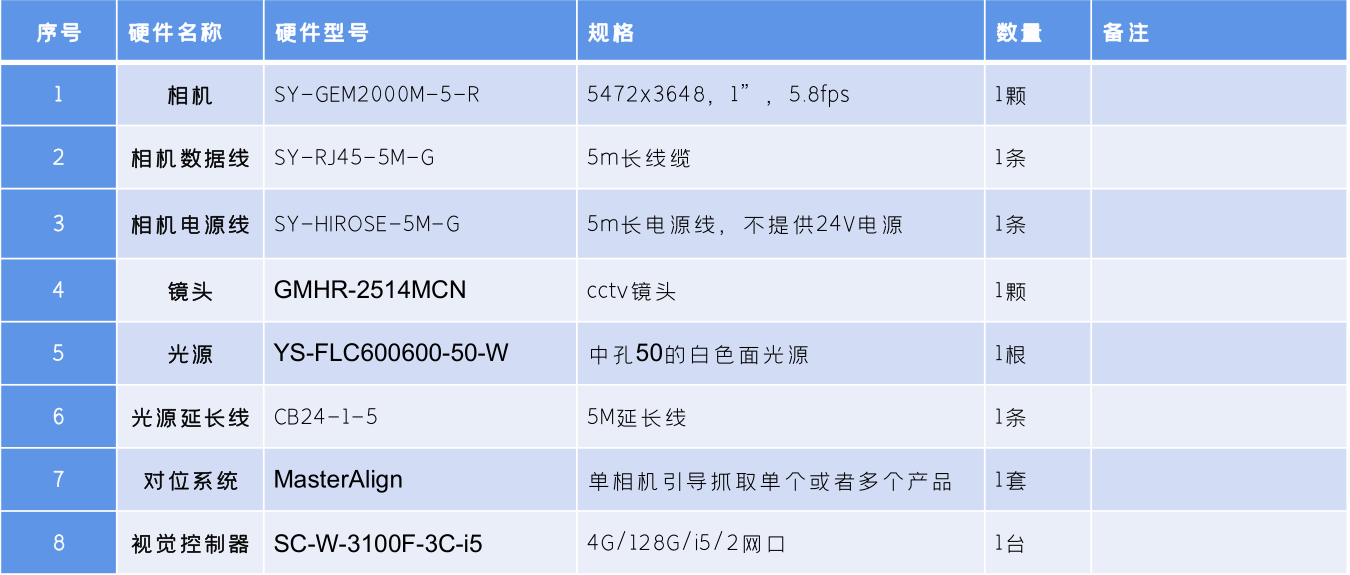
系統配置清單
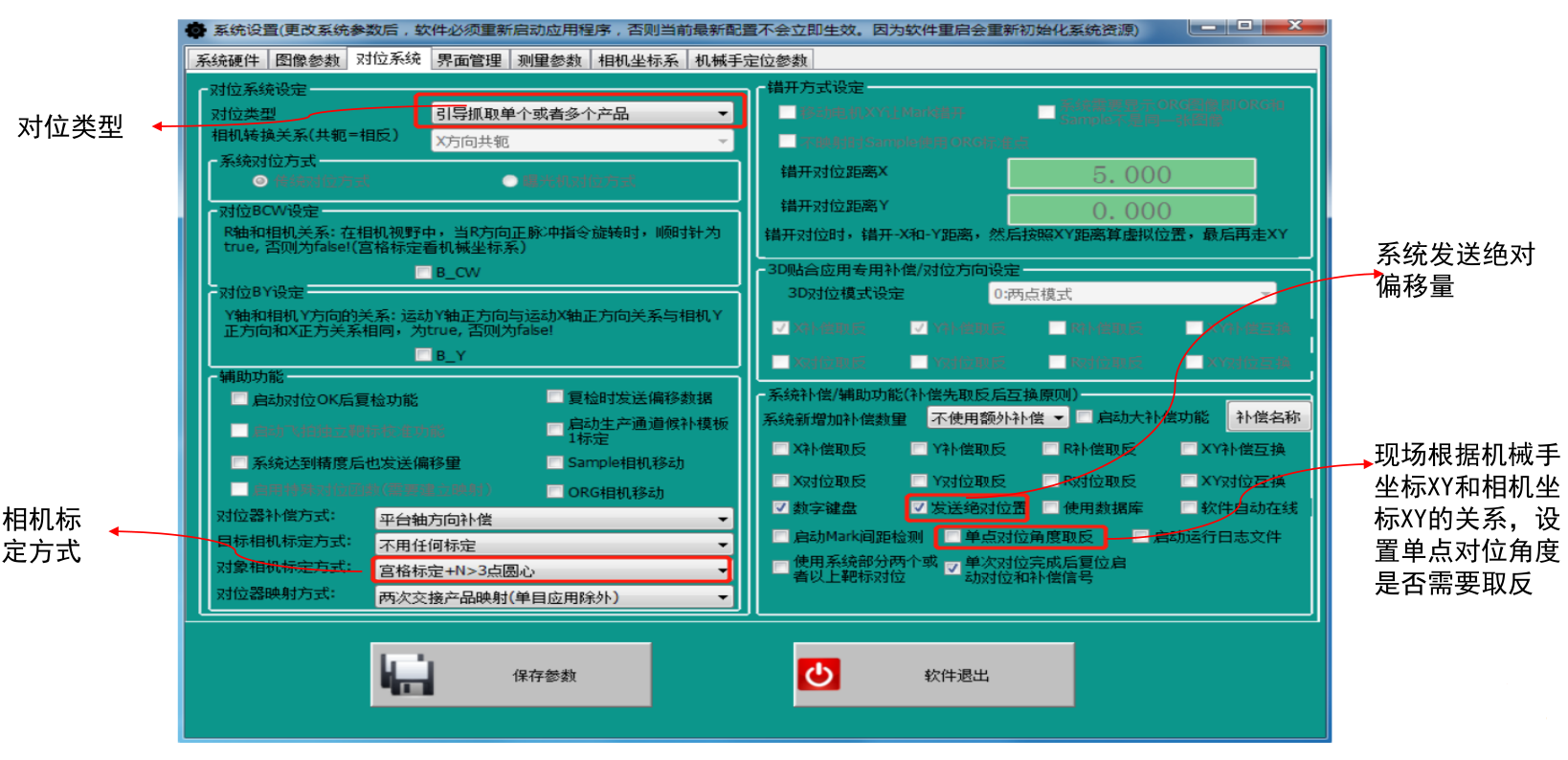
設置軟件配置
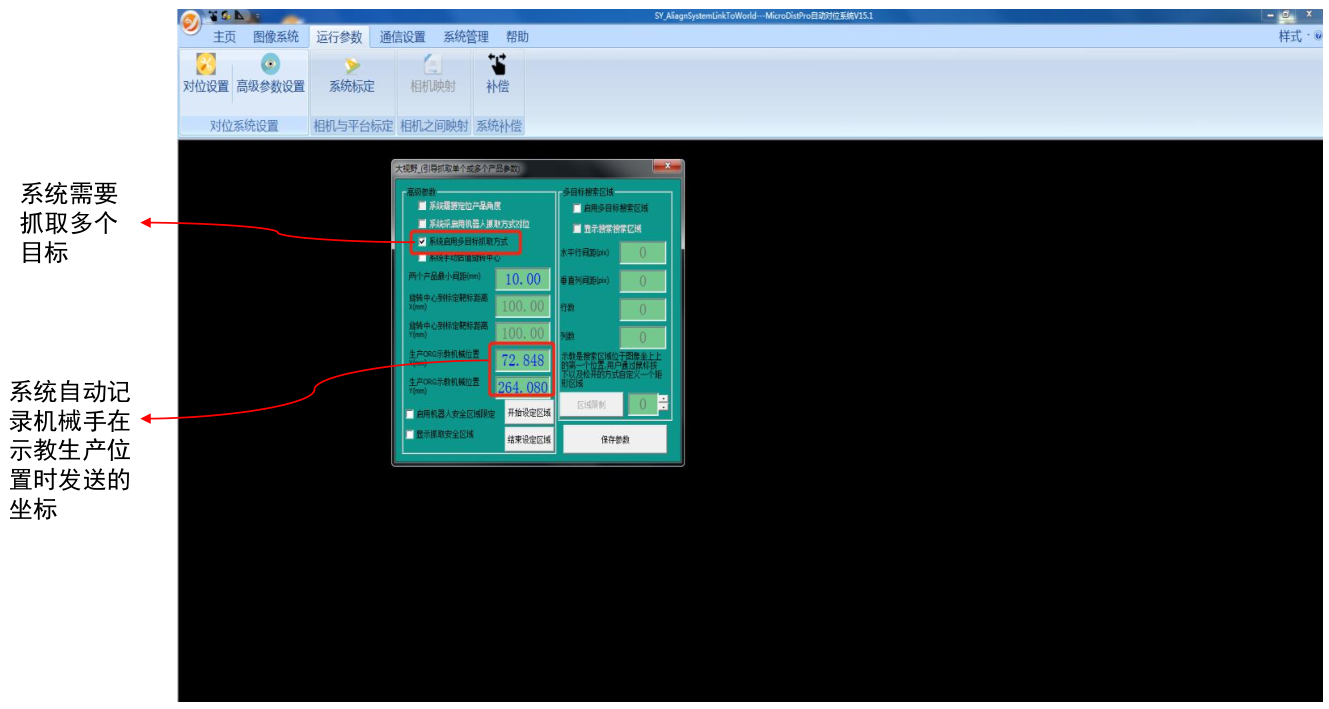
設置軟件配置-基礎參數
宮格標定行數和列數的計算

根據視野計算宮格的行數和列數
軟件操作介紹
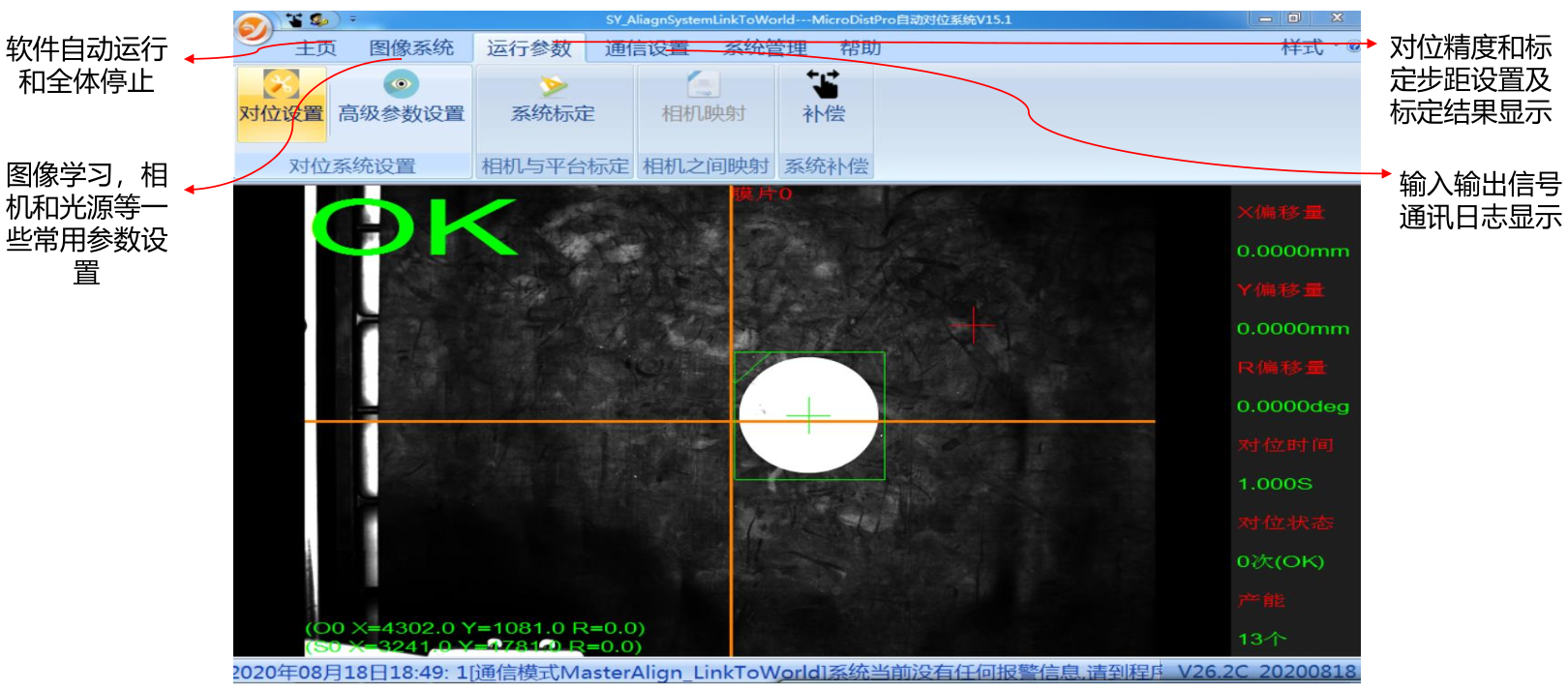
軟件主頁
說明:只要相機位置有移動必須要進行標定
系統標定(機械手根據宮格坐標走位置吸放產品,相機對產品進行每個位置拍照)

說明:更換不同型號產品必須要示教生產位置
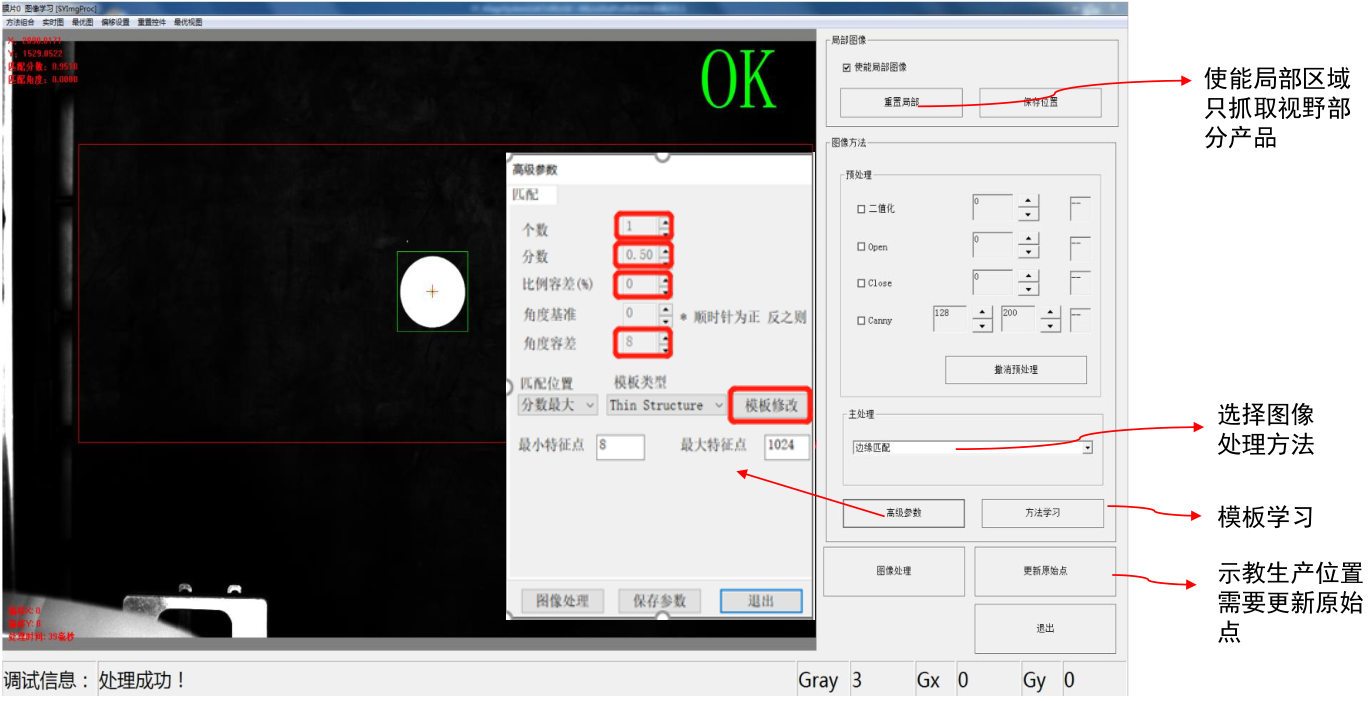
進入高級參數界面設置相關參數:
個數:查找產品的個數。
分數:和學習目標模板分數的相似度,建議分數0.5左右。 比例容差:學習的目標模板和查找產品的大小比例,建議1至2 左右。
角度容差:允許來料產品角度變化的范圍正負值,超出設置的此范圍則匹配模板失敗。
模板修改:腌膜,剔除模板干擾點。
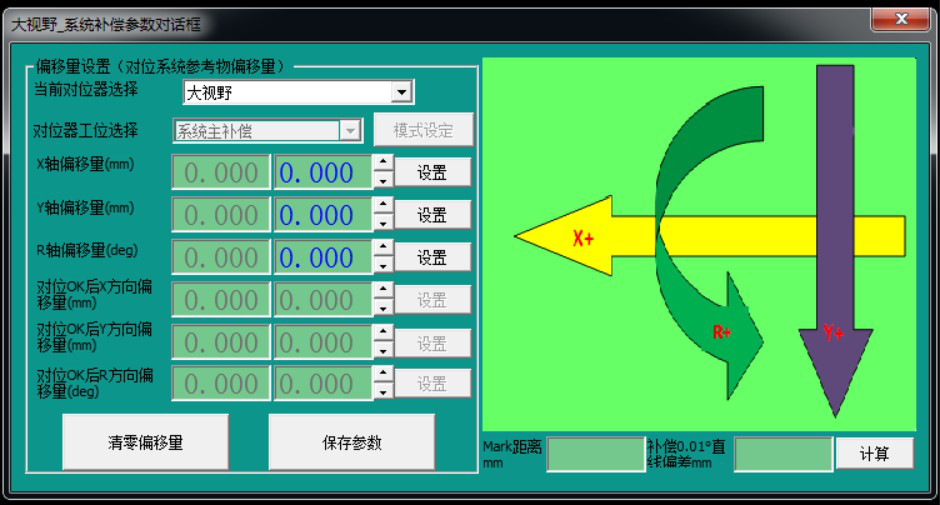
系統補償
根據實際應用需求,機械手吸盤抓取物料中心位置偏差進行補償。補償的方向參照機械手的的坐標系方向。如圖方向所示。
MasterAlign全景視覺引導應用軟件通訊版本,我們以MasterAlign_LTW介紹通訊部分知識,詳情見文中所述:
MasterAlign_LTW(下文中簡稱為MA_LTW)為雙翌自主研發的視覺對位系統應用軟件,軟件中的通訊日志可方便我們進行整個通訊流程的接收和查詢流程進行分析,詳情見文檔所示:
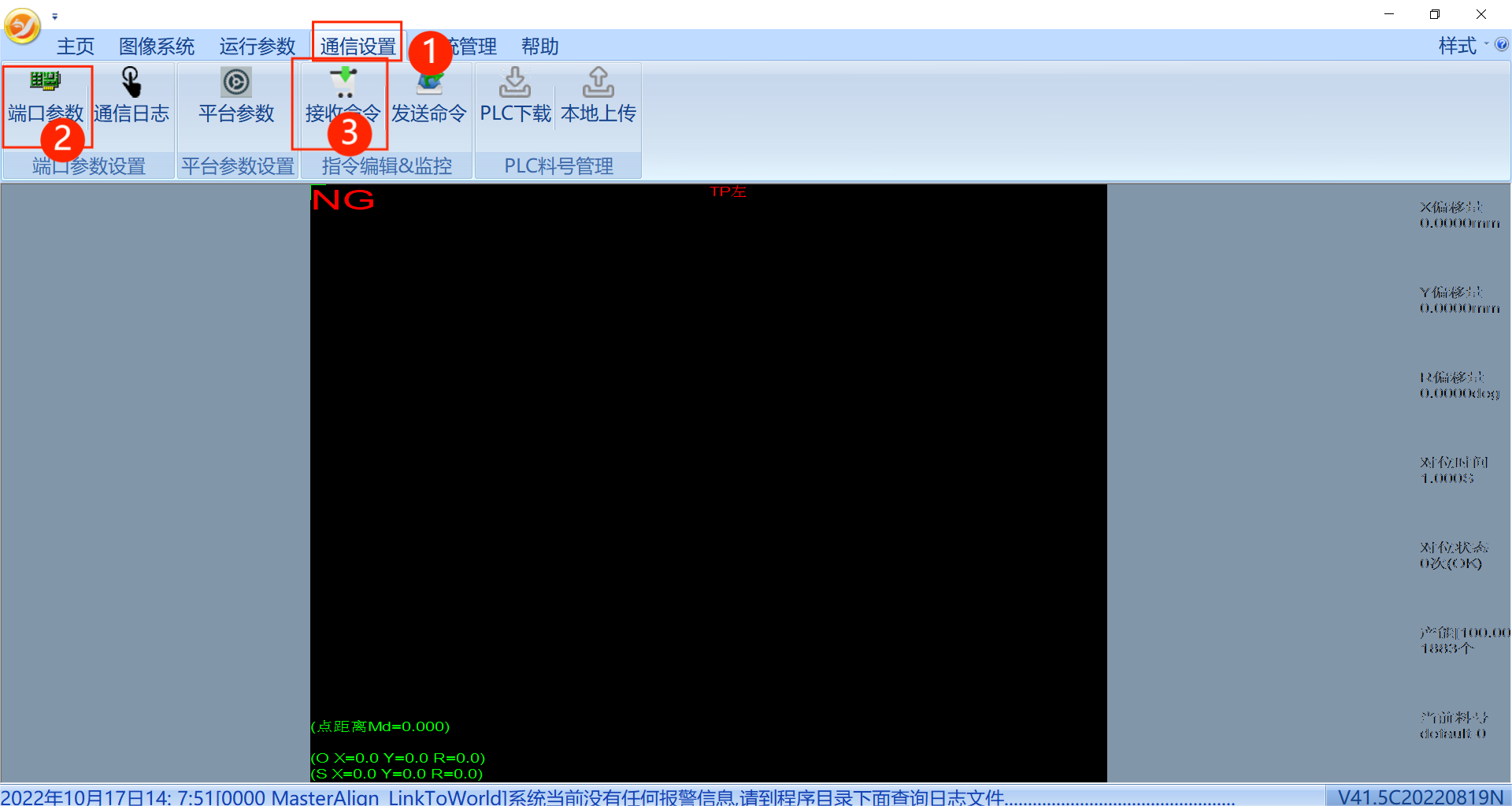
1、如何打開MA視覺對位系統通訊日志
Fig.1 打開通訊日志方法
點擊圖像中①進入到通訊設置界面,點擊②③,分別打開通訊日志和端口參數界面
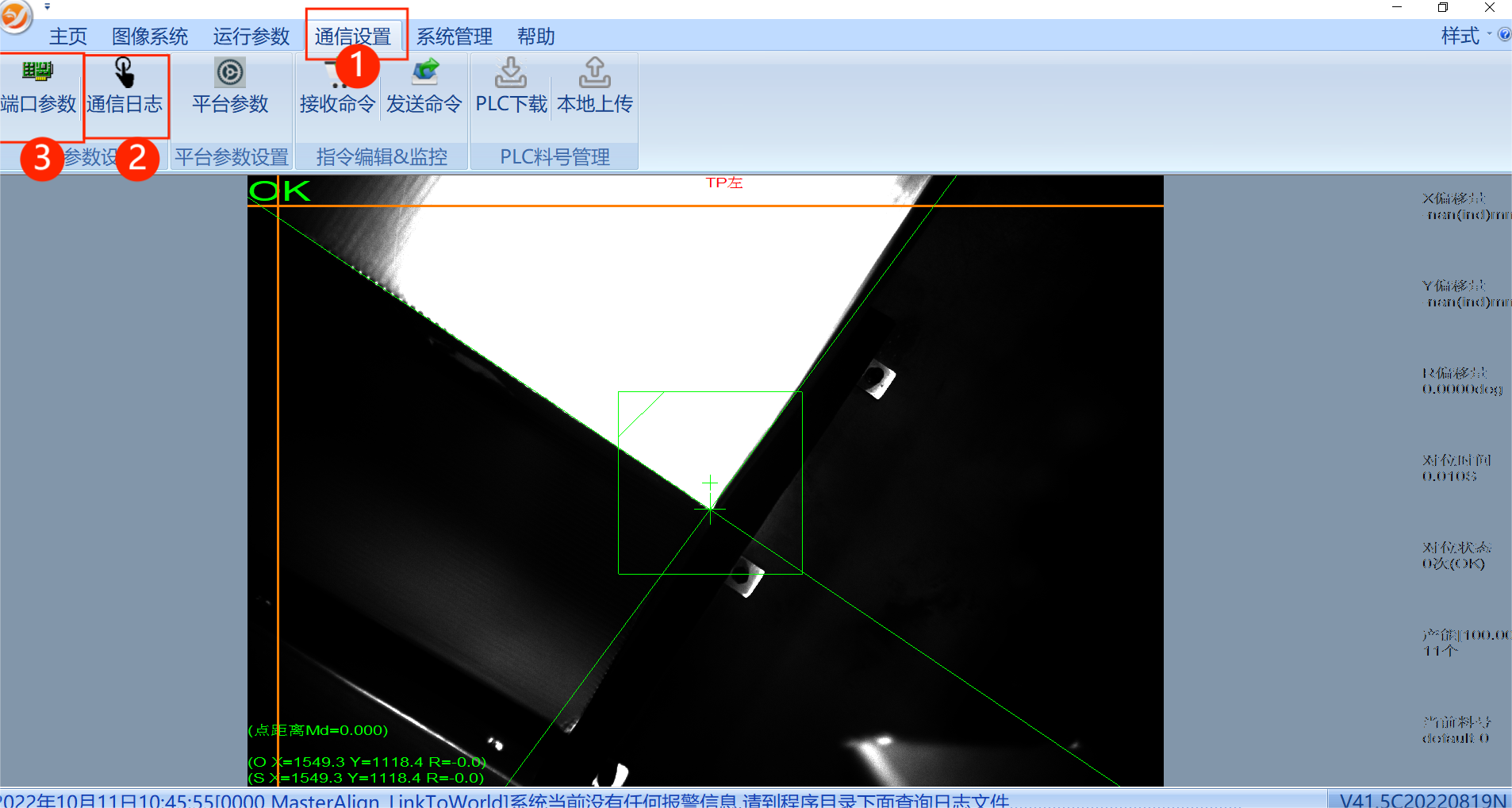
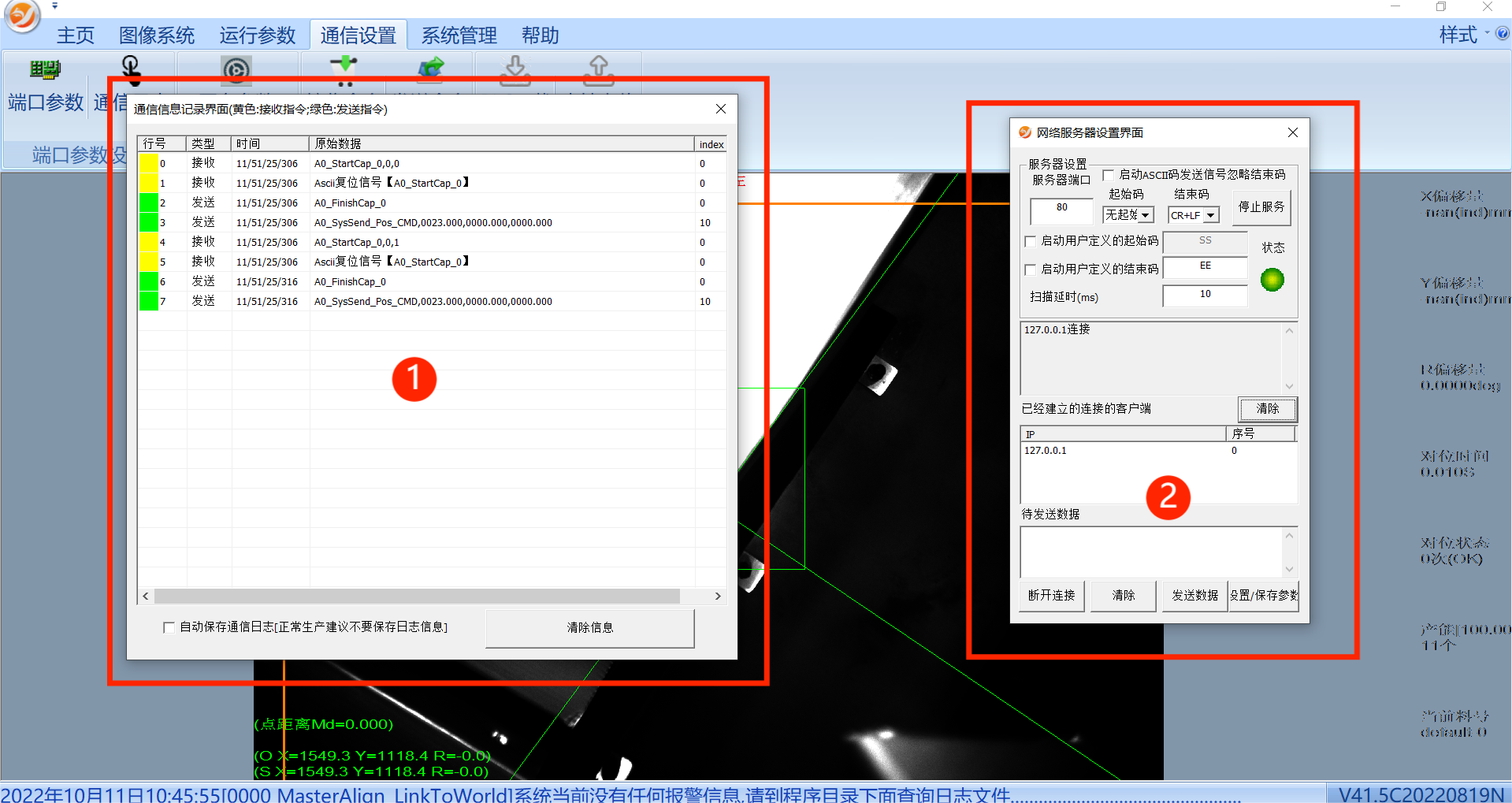
Fig.2 通訊日志和端口參數
下圖中①是通訊日志,②是端口參數
2、如何通過MA視覺對位系統通訊日志查看流程運行時間
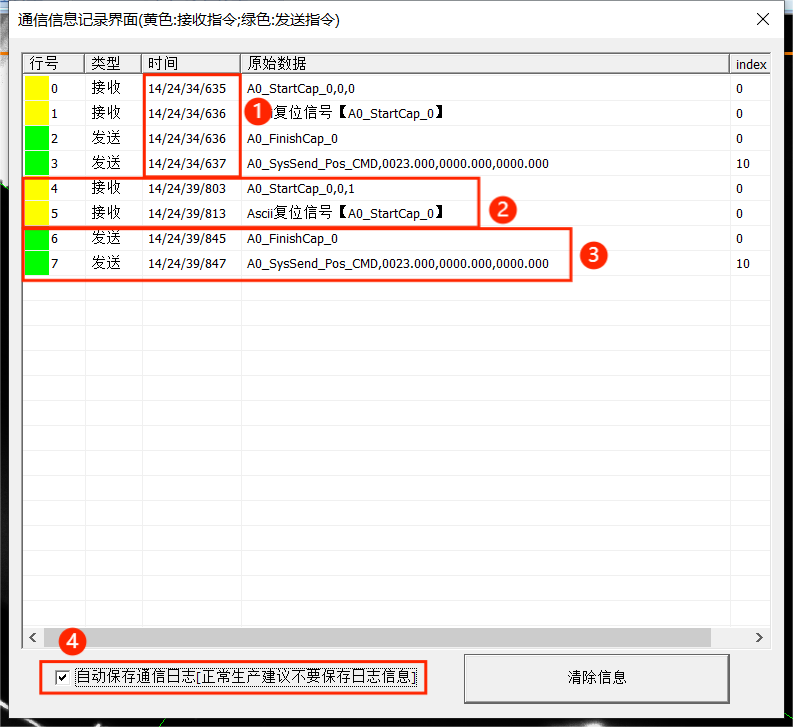
Fig.3 通訊日志界面
通訊日志:
①是一個流程的運行時間,由機器人發信號到視覺返回信號為一個通訊流程,時間是由時、分、秒、毫秒組成,例如圖中14/24/34/635 就是14時24分34秒635毫秒
②黃色是接收,機器人發過給視覺的數據和信號
③綠色是發送,視覺返回給機器人的數據和信號
④自動保存通訊日志里面的所以數據,生成數據在文件夾里面的“SYCommunicateLogFile”文件夾里面,通過存儲的日志文件可以看出發送的數據準不準確
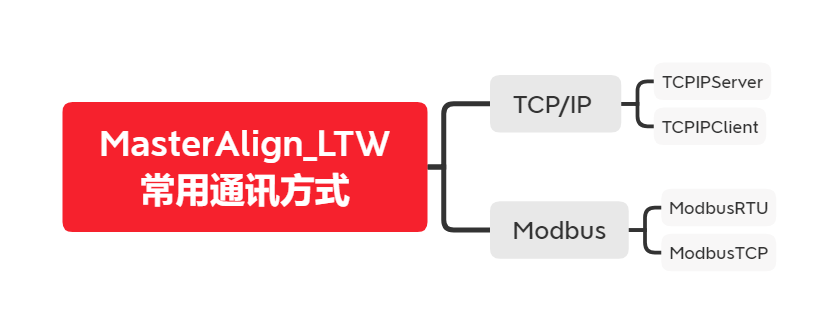
3、MA_LTW通訊方式
MA_LTW軟件廣泛應用于工業應用現場精密對位和精密裝配場合中,常用的通訊方式如下所示:
MA_LTW配合過的PLC和機械手通訊見網站鏈接所示:http://www.congdei.cn/news_99.html
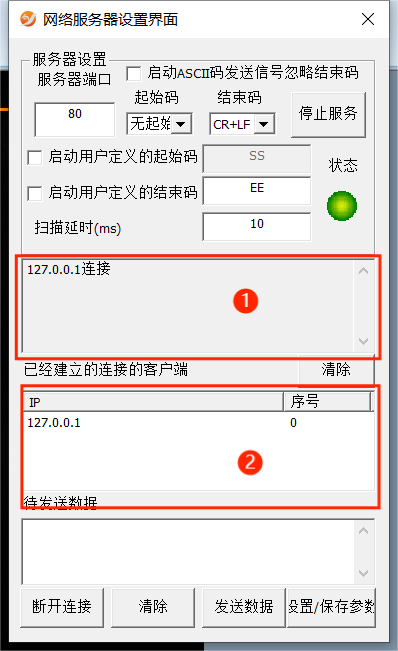
3.1 TCPIPServer
這是TCP網口連接通訊,需要設置IP,視覺軟件做服務器
端口參數:①可以看到連接、斷開、接收的數據
②可以確認通訊是否保持連接,連接通訊的個數
起始符:通訊數據的開始標示
類型:STX是正文開始
結束符:通訊數據的結束標示
類型:CR是回車
CR+LF是回車+換行
ETX是正文結束
LF是換行
ETX+CR是正文結束+換行
更改端口、參數后需要點擊右下角“設置/保存參數”后再進行操作
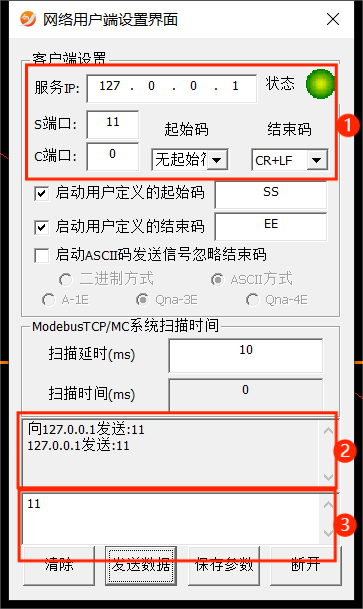
3.2 TCPIPClient
TCP網口連接通訊,需要設置IP,視覺軟件做客戶端
端口參數:②可以看到接收和發送的數據
③是手動發送給服務器的數據
S端口:服務器端口
C端口:本地端口
起始符:通訊數據的開始標示
類型:STX是正文開始
結束符:通訊數據的結束標示
類型:CR是回車
CR+LF是回車+換行
ETX是正文結束
LF是換行
ETX+CR是正文結束+換行
更改IP/端口、數據后需要點擊下面的“保存參數”后再進行操作
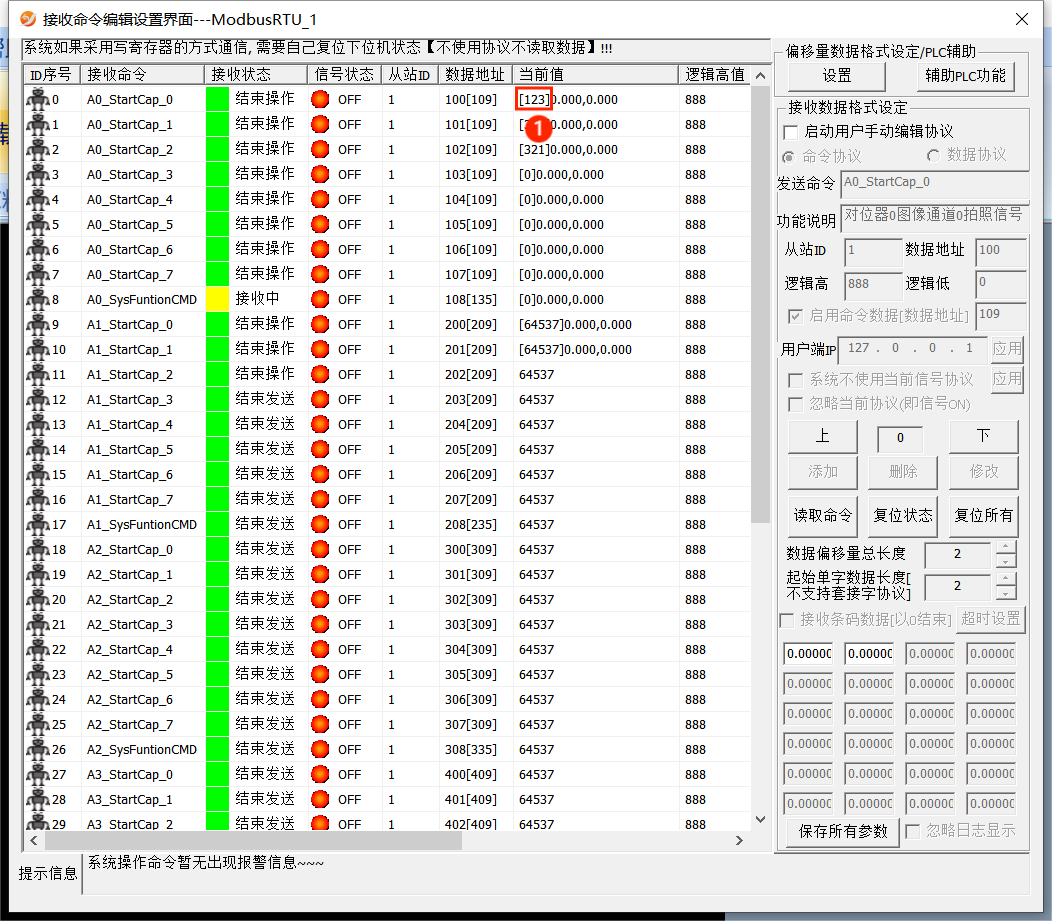
3.3 ModbusRTU
Modbus串口通訊
點擊①后打開端口參數②和接收命令③
①是串口號,要與PLC串口對上,②的設置要與PLC端口一致,③僅是代表端口是否打開,即使亮綠燈也不代表和PLC連接正常,修改①和②后要點擊右下角“設置/保存參數”保存參數
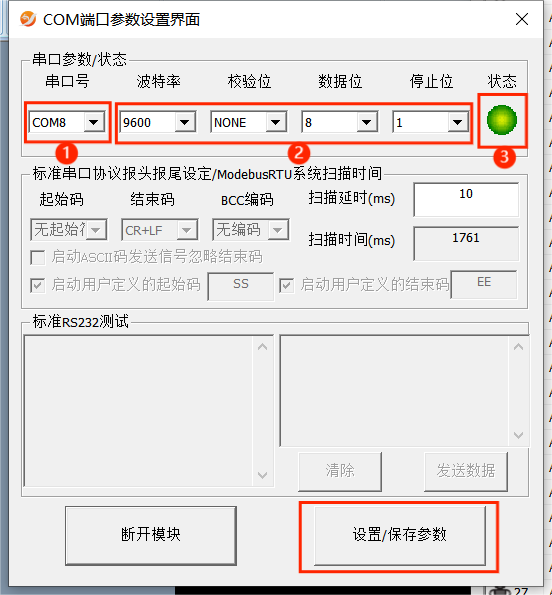
在①中可以看到PLC發送過來的數據
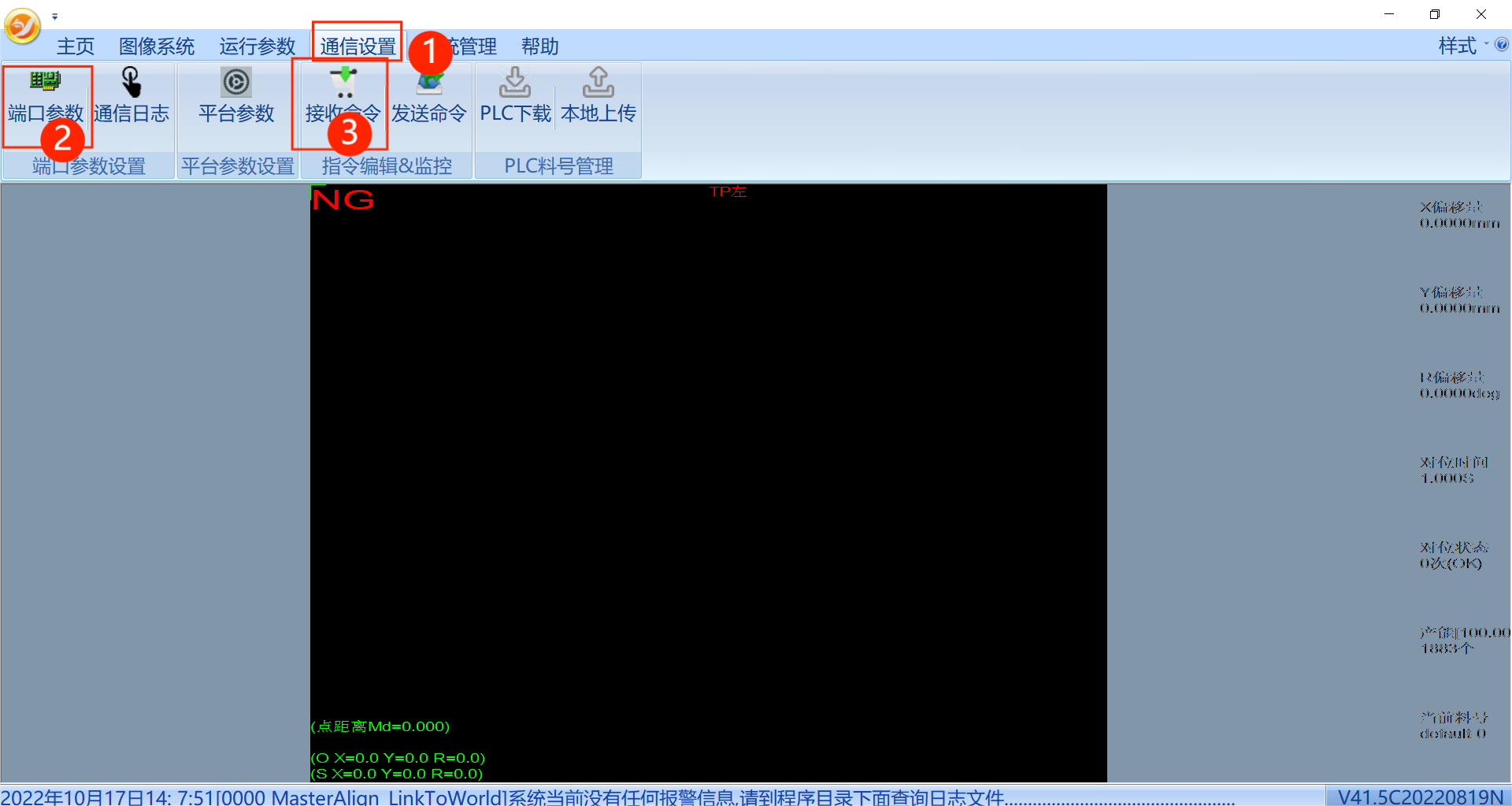
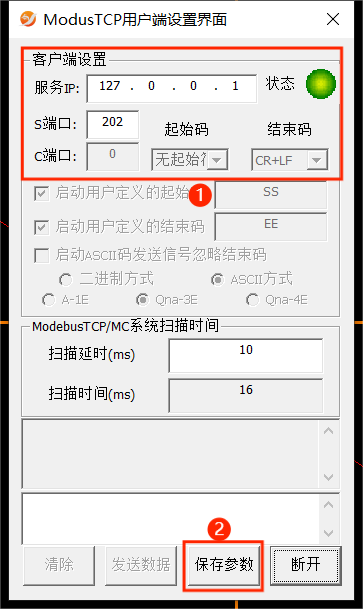
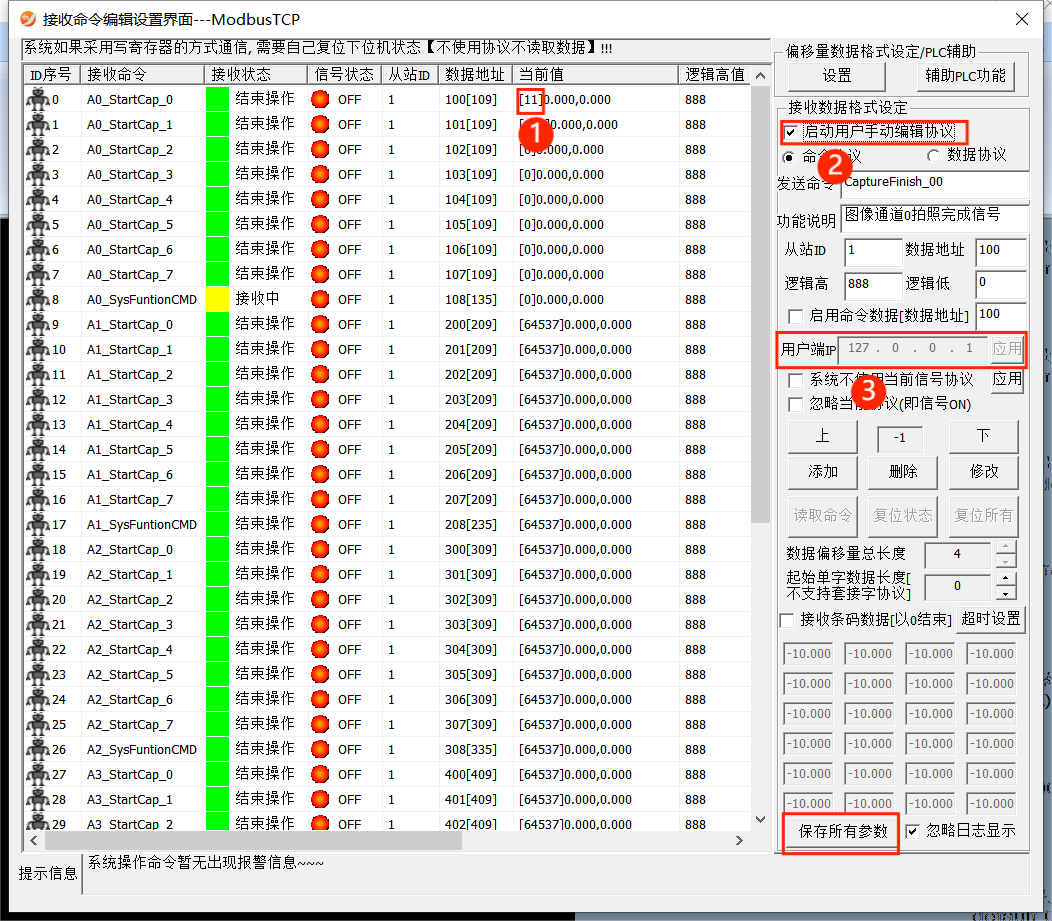
3.4 ModbusTCP
Modbus TCP通訊
點擊①后打開端口參數②和接收命令③
連接通訊
在①里面修改IP和端口號,修改后須在②點擊“保存參數”
①是PLC發送過來,視覺接收到的數據,點擊②之后才能進行編輯右邊的數據,要保證③IP地址和PLC的地址一樣,修改后點擊下面“保存所有參數”保存,然后點擊②才可以退出
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
